 2018, Vol. 33
2018, Vol. 33

为了降低人类进入空间的操作成本, 同时提高空间运输效率, 可重复使用运载器受到了广泛的研究和关注.作为一类新型的飞行器, RLV能够实现重复性的使用, 并经过简单修复就可以再次进入空间, 因此在军事和民用方面有着广泛的应用价值[1-2].然而, 由于RLV在再入飞行过程中要穿越大范围飞行包线, 空气密度和飞行速度变化较大, 动力学参数变化剧烈, 使得RLV模型呈现强耦合、强非线性、快时变特性, 同时伴有参数不确定性和外界干扰[3-4].因此, 为了保证飞行器安全、稳定的再入飞行, 设计可靠的姿态控制器显得非常关键.
近几十年来, 国内外学者针对RLV再入飞行过程特点提出了许多控制策略, 并应用于可重复使用运载器中. Stott等[5]基于内外双环控制结构, 设计了时变滑模控制器, 并应用于可重复使用运载器控制系统中, 然而其控制器参数的选取需要一定的工程经验, 这在实际实验中比较难实现; Drake等[6]针对RLV提出次优非线性控制技术, 避免了模型迭代在线求解问题, 实现了高精确地跟踪制导指令, 但该控制器需要设计高维度的矩阵, 其计算过程较为繁琐; Shao等[7]将自抗扰控制和轨迹线性化方法相结合设计了姿态控制器, 并应用于再入高超声速飞行器中, 实现了对期望姿态指令的稳定跟踪, 但是该策略具有较为有限的鲁棒性; Haghighat等[8]将模型预测方法应用于高柔性飞行器的控制系统设计中, 但是该控制方法在线处理最优化问题的能力较为有限, 且难以确定时域步长; Ansari等[9]提出了广义动态反演策略, 并将其应用于卫星运载器的姿态控制器设计中, 使得系统有较好的跟踪性能, 但是该控制器对系统模型不确定性的鲁棒性能不足; Wang等[10]针对再入可重复使用运载器控制模型存在外界干扰的情形, 基于反步法提出了鲁棒自适应控制器, 使得飞行系统具有良好的鲁棒性, 但是所设计的控制力矩输入在变化时可能会出现抖振问题; Min等[11]针对再入飞行器控制问题, 基于Mamdani模糊逻辑系统设计了飞行控制系统并应用于RLV中, 使得系统具有良好的跟踪控制性能, 但是该控制策略并未考虑飞行器模型存在不确定性和外界干扰的情形.
本文考虑可重复使用运载器在再入飞行过程中存在参数不确定性和外界干扰时姿态跟踪控制问题, 提出一种基于自适应模糊H∞控制的姿态复合控制策略.首先, 建立再入RLV动态模型, 并转化为面向控制的姿态控制模型.其次, 利用模糊系统在线逼近模型不确定性项, 并设计H∞控制项以补偿模糊建模误差和系统外界干扰.然而, H∞控制项的引入会削弱模糊系统的逼近能力, 进而增加控制系统建模误差, 对飞行器姿态跟踪性能产生不利影响.为了避免该问题, 分两部分设计RLV姿态控制器:在姿态角模糊逼近区域内基于自适应模糊H∞控制设计姿态跟踪控制器, 以保证飞行器姿态跟踪性能; 在姿态角模糊逼近区域外基于边界自适应技术设计姿态镇定控制器, 以确保系统稳定性.最后, 基于Lyapunov理论证明了闭环控制系统的稳定性, 并通过再入飞行器六自由度模型的仿真验证了所提控制策略的有效性.
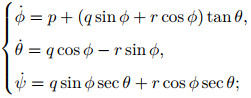
1 再入RLV模型与问题描述 1.1 再入RLV模型忽略地球自转对再入飞行阶段的影响, 本文考虑飞行器的再入运动过程为无动力飞行, 即推力为零, 飞行器通过姿态调整实现马赫数的减小.可重复使用运载器再入姿态动态模型描述[12-13]如下:
|
(1) |
|
(2) |
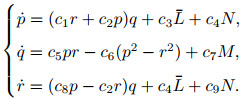
其中:ϕ, θ, ψ分别为飞行器的滚转角、俯仰角和偏航角.p, q, r分别为飞行器的滚转角、俯仰角和偏航角的角速度.c1, c2, …, c9具体表示为

|
(3) |
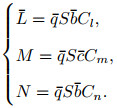
a=JxxJzz-Jxz2, Jxx, Jyy和Jzz分别表示飞行器绕x轴、y轴和z轴的转动惯量.由于RLV关于Oxz平面对称, Jxy=Jyx=Jyz=Jzy=0.L、M和N分别为滚转力矩、俯仰力矩和偏航力矩, 描述为
|
(4) |
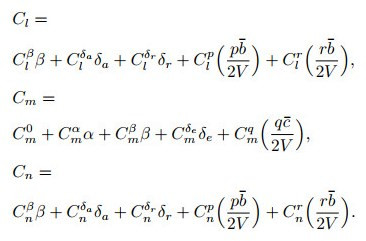
q=0.5ρV2为气动压, ρ为空气密度, V为飞行速度; S为翼参考面积; b为翼展长; c为翼弦长; Cl、Cm和Cn分别为滚转、俯仰和偏航力矩系数, 其表达式为
|
α、β分别为攻角、侧滑角; δa、δe和δr分别为飞行器副翼偏转角、升降舵偏转角和方向舵偏转角; C**为相应的气动系数, 其具体参数值见表 1.
| 表 1 RLV模型参数值 |
由于RLV动态模型(1)和(2)的非线性较强, 使得再入姿态控制器变得较为复杂.因此, 为便于飞行器姿态控制器的设计, 将再入RLV动态模型转化为面向控制的姿态控制模型.首先将式(4)代入(2)中, 则方程(2)可以转化为如下形式:

|
(5) |
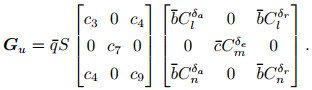
其中fp, fq, fr和Gu分别表示为
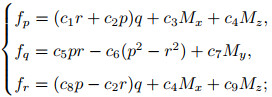
|
(6) |
|
(7) |
Mx, My, Mz分别为
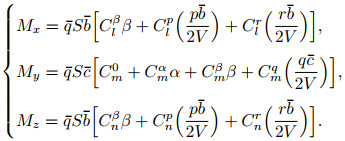
|
(8) |
对式(1)进行微分, 得到如下方程:

|
(9) |
将式(5)代入(9)中, 得到如下姿态模型:

|
(10) |
其中L(ϕ, θ)和g(ϕ, θ, ψ)分别为
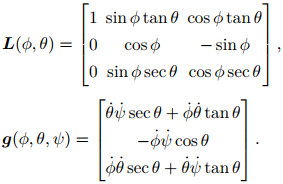
|
由于RLV在再入飞行阶段飞行条件变化剧烈, 气动系数ΔC**变化较大, 飞行器易受参数不确定性以及系统外界干扰的影响, 为此将飞行器姿态控制模型(10)进一步地具体描述为
|
(11) |
其中:di表示系统外界干扰项, i=1, 2, 3; Δfi和ΔGu表示飞行器参数变化引起的不确定项, 分别为
|
ΔC**表示飞行器相对应的气动系数摄动项; ΔMx、ΔMy、ΔMz分别为飞行器气动参数摄动引起的不确定项, 描述为
|
将式(11)表示为二阶非线性系统, 有

|
(12) |
其中:x=[x1, x2, x3]T=[φ, θ, ψ]T为再入飞行器的姿态角状态向量, u=[u1, u2, u3]T=[δa, δe, δr]T为飞行器的控制量, y=[y1, y2, y3]T为系统的控制输出; Δf(x)=[Δf1, Δf2, Δf3]T和Δg(x)=L(ϕ, θ)ΔGu=[Δgij(x)]∈R3×3为气动参数摄动引起的不确定项; d=[d1, d2, d3]T为系统的外界扰动项; f(x)=L(ϕ, θ)[fp, fq, fr]T+g(ϕ, θ, ψ)=[f1(x), f2(x), f3(x)]T和Δg(x)=L(ϕ, θ)ΔGu=[Δgij(x)]∈R3×3为系统的函数矩阵.
为方便后续的设计与分析, 令Δfs(x)=Δ f(x)+d为函数矩阵f(x)不确定项, 其中Δfs(x)∈R3×1.对RLV姿态控制系统给出如下假设.
假设1 系统参数不确定性项Δf(x)、Δg(x)和外界干扰项d均为有界.即存在有界的正函数ΔfL(x), ΔfH(x)∈R3×1, ΔgL(x), ΔgH(x)∈R3×3和dH(x)∈R3×1, 使得对于任意状态向量x, 不等式0 < ΔfiL(x) < Δfi(x)≤ ΔfiH(x), 0 < ΔgijL(x) < Δgij(x)≤ ΔgijH(x)和|di(x)|≤diH(x)均成立, i, j=1, 2, 3.
再入段RLV姿态控制器的设计目标是基于飞行器面向控制的姿态模型(11)和(12), 在系统存在参数不确定性和外界干扰的情形下, 设计合理的姿态控制器输入u, 以实现对期望姿态角指令yd渐近稳定的跟踪.
2 基于自适应模糊H∞的姿态器设计 2.1 模糊系统建模定义RLV姿态角跟踪指令yd=[φd, θd, ψd]T, 定义姿态角跟踪误差为ei=yid-yi, 跟踪误差向量为Ei=(ei, ėi)T.
为设计RLV姿态控制器, 先给出如下引理.
引理1[14-15] 在紧集Ω内任意给定的光滑连续函数f(x), 对于任意常数ε>0, 都存在一个模糊系统θTξ(x)使得

由于系统不确定项Δfs(x)和Δg(x)为连续的, 且与姿态角x相关, 针对RLV三通道姿态角x定义Ni个模糊集合Fili(li=1, 2, …, Ni), 分别利用模糊系统

|
(13) |

|
(14) |
其中:εf=[ε1f, ε2f, ε3f]T和εg=[εijg]∈R3×3为系统逼近误差向量; θf=[θ1f, θ2f, θ3f]和θg=[θijg]∈R3×3为相应模糊系统的有界参数向量, 且θif∈R1×W, θijg∈R1×W, i, j=1, 2, 3. ξf(x)和ξg(x)表示相应模糊系统的基函数向量, 且ξ(*)(x)=[ξ1(x), …, ξW(x)]T∈RW×1, 其第l1, …, lm个基函数向量可以表示为
|
(15) |
其中: 
为了避免H∞控制项对模糊系统逼近特性的削弱问题, 将基于再入飞行器的姿态控制模型(12)分两步设计RLV姿态控制器.
2.2.1 姿态跟踪控制器设计首先考虑姿态角向量x∈Ω时飞行器的姿态跟踪问题, 并选择合适的参数向量Ki=[ki2, ki1], 使得p(s)=s2+ki1s+ki2为Hurwitz多项式, 则设计RLV姿态跟踪控制器为
|
(16) |
其中: 

|
(17) |
这里

|
参数ri>0和Pi=PiT>0满足如下Riccati方程:

|
(18) |

由式(12)和(16)可以分别得到如下动态方程:

|
(19) |
|
(20) |
将上两式相减, 并作矩阵转化, 得到RLV姿态角跟踪误差向量的动态方程
|
(21) |
基于式(21), 定义RLV姿态模型的模糊建模误差wi和最优模糊建模误差wi*如下所示:
|
(22) |
|
(23) |
其中:θif*和θijg*为最优参数向量, 表示为
|
Ωf和Ωg分别为参数向量θif和θijg的有界紧集.
令
|
则姿态角跟踪误差向量动态方程可进一步转化为
|
(24) |
为了得到系统的参数自适应律, 定义系统的姿态角滤波建模误差
|
(25) |
其中:

|
(26) |
βi≥ωi为有限常数,
由滤波建模误差的定义有
|
(27) |
定理1 对于再入RLV面向控制的姿态模型(12), 在x∈Ω时满足假设1, 选取控制律(16), 并设计参数向量的自适应律如下:

|
(28) |
则闭环系统可实现渐近稳定, 且姿态跟踪误差向量和滤波建模误差向量均收敛于原点附近小邻域内:

|
(29) |
其中:γif, γijg, γiε∈R+表示学习率, λmin(Qi)表示矩阵Qi最小特征值.
证明 选择如下形式的Lyapunov候选函数:
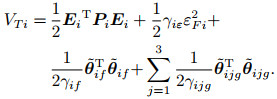
|
(30) |
VTi关于时间求导, 代入式(16)和(24), 有
|
将式(17)、(18)和(26)代入上式, 得到
|
将参数向量自适应律(28)代入上式, 经整理有
|
(31) |
根据文献[17], 有

|
(32) |
由式(32)可知, 当

考虑姿态向量x∈Ω时的RLV姿态镇定问题.此时, 引理1的模糊系统和控制器uh*不再有效, 即
假设2[18] 对于任意状态向量x∈R3, RLV姿态控制系统的不确定项Δfs(x)和Δg(x)满足

|
其中
|
设计RLV的姿态镇定控制器如下所示:

|
(33) |
其中:





由式(12)和(33)可以分别得到如下方程:
|
(34) |
将上两式相减, 并作矩阵转化, 得到如下动态方程:
|
(35) |
选取合适的Ki, 确保Ai为稳定矩阵, 则对于任意给定的正定对称矩阵Qi, 一定存在唯一的正定对称矩阵Pi满足Lyapunov方程AiTPi+PiAi=-Qi.
定理2 对于再入RLV面向控制的姿态模型(12), 在x∈Ω时满足假设1和假设2, 选取控制律(33), 并设计参数向量的自适应律如下:
|
(36) |
则闭环控制系统可以实现渐近稳定, 且姿态角跟踪误差向量Ei最终收敛于原点附近的小邻域内:
|
(37) |
其中:εif, εijg>0为常数; ηif, ηijg>0为学习率.
证明 选择系统的Lyapunov候选函数为
|
(38) |
其中
|
VHi关于时间的导数为
|
(39) |
代入自适应律(36), 经整理有

|
根据假设2, 上式可进一步转化为
|
由上式可知, 当

|
时, 有
为得到RLV姿态控制系统平滑的控制输入, 基于式(16)和(33)设计飞行器总体姿态控制器如下:

|
(40) |
其中τ为权重系数, 表示为
|

为了验证所提控制策略的正确性和有效性, 基于Matlab建立可重复使用运载器六自由度模型, 并考虑再入飞行阶段控制系统存在参数不确定性和外界干扰情形, 进行仿真实验.
再入RLV模型的参数值见表 1, 所有气动参数值均在Matlab中通过曲线拟合方式得到.再入飞行器的初始条件分别设定为:高度H0=30 km, 速度V0=8 Ma, 姿态角θ0=15 deg, φ0=ψ0=0 deg, 攻角α0=15 deg, 侧滑角β0=0 deg, p0=q0=r0=0 deg/s.再入飞行中参数不确定性项选取为Δf(x)=20% f(x)和Δg(x)=20% g(x), 有界外界干扰项选取为d=[0.35+0.35sin 0.3t, 1.85+0.75sin 0.5t, 0.55+0.50sin 0.25t]T.
在仿真中, 采用以高斯型函数为主的隶属函数.取ri=2ρi2, 控制器参数分别选取为
|
采取控制律(40), 参数向量自适应律取式(28)和(36).
图 1分别给出了RLV滚转角、俯仰角和偏航角跟踪响应曲线, 其中虚线为期望姿态角跟踪指令, 实线为基于自适应模糊H∞控制的姿态复合控制的姿态跟踪信号, 点线为传统的自适应模糊H∞控制的姿态跟踪信号.

|
图 1 RLV姿态角跟踪曲线 |
从图 1可以看出, 当RLV模型存在参数不确定性和外界干扰时, 所设计的姿态控制器能够使飞行器实际姿态角输出以较高精度跟踪期望指令信号, 且其姿态跟踪性能要优于传统的自适应模糊H∞控制方法.
图 2分别给出了飞行器滚转角、俯仰角和偏航角跟踪误差变化曲线, 其中实线为基于自适应模糊H∞控制的姿态复合控制的姿态跟踪误差变化曲线, 点线为传统的自适应模糊H∞控制的姿态跟踪误差变化曲线.

|
图 2 RLV姿态角误差变化曲线 |
由图 2可知, 所提出的控制策略的姿态跟踪误差要小于传统的自适应模糊H∞控制方法, 且飞行器在设计的姿态控制器作用下能够在较短的时间内对期望值姿态角实现渐近稳定地跟踪, 飞行器三通道姿态角的最大跟踪误差不超过0.38 deg.由于俯仰角的给定跟踪指令相对较大, 在跟踪误差变化幅值上要比滚转角和偏航角稍大点, 但都在合理的变化范围内.
图 3分别给出了飞行器的副翼、升降舵和方向舵偏转角响应变化曲线, 其中实线为基于自适应模糊H∞控制的姿态复合控制的舵面偏转角响应曲线, 点线为传统的自适应模糊H∞控制的舵面偏转角响应曲线.

|
图 3 RLV舵偏角响应曲线 |
图 3表明, 所设计的姿态控制器使得飞行器能够以较小的舵偏角实时响应飞行器的期望跟踪指令, 且飞行器的舵偏转角输出较为平滑, 其幅值变化在合理范围内, 进而使得RLV实际姿态角输出能够较准确快速地响应期望指令.
基于以上分析可以看出, 当再入RLV姿态控制系统存在参数不确定性和外界干扰时, 基于自适应模糊H∞的再入姿态复合控制策略能够实现良好的姿态跟踪性能, 且其跟踪控制性能优于传统的自适应模糊H∞控制方法, 进而确保RLV再入阶段的安全、稳定飞行.
4 结论本文针对可重复使用运载器再入段姿态控制问题, 提出了基于自适应模糊H∞控制的姿态复合控制策略.利用模糊系统在线自适应逼近模型不确定性项, 设计H∞控制项用以补偿模糊系统建模误差和外界干扰; 同时, 为避免H∞控制项对模糊系统逼近能力的削弱问题, 在姿态角模糊逼近区域内部结合模糊系统和H∞控制器设计了姿态跟踪控制器, 以确保飞行器姿态跟踪性能; 在姿态角模糊逼近区域外部基于边界自适应技术设计姿态镇定控制器, 以保证控制系统稳定性能.基于Lyapunov理论的稳定性分析证明了闭环控制系统的稳定性以及姿态角跟踪误差的最终有界性, 并利用本文提出的控制策略, 基于再入飞行器六自由度模型进行了仿真验证.仿真结果表明, 在飞行器模型存在参数不确定及外界干扰的情形下, 所提出的控制策略具有良好的跟踪控制性能, 能够有效地实现对再入飞行过程中期望指令信号准确跟踪, 验证了所设计控制策略的有效性.
| [1] |
Wang F, Hua C, Zong Q. Attitude control of reusable launch vehicle in reentry phase with input constraint via robust adaptive backstepping control[J]. Int J of Adaptive Control and Signal Proccessing, 2015, 29(10): 1308-1327. DOI:10.1002/acs.v29.10 |
| [2] |
Halbe O, Raja R G, Padhi R. Robust reentry guidance of a reusable launch vehicle using model predictive static programming[J]. J of Guidance, Control, and Dynamics, 2013, 37(1): 134-148. |
| [3] |
Hall C E, Shtessel Y B. Sliding mode disturbance observer-based control for a reusable launch Vehicle[J]. J of Guidance, Control, and Dynamics, 2012, 29(6): 1315-1328. |
| [4] |
Gao Z, Jiang B, Shi P, et al. Active fault tolerant control design for reusable launch vehicle using adaptive sliding mode technique[J]. J of Franklin Institute, 2012, 349(4): 1543-1560. DOI:10.1016/j.jfranklin.2011.11.003 |
| [5] |
Stott J E, Shtessel Y B. Launch vehicle attitude control using sliding mode control and observation techniques[J]. J of Franklin Institute, 2012, 349(2): 397-412. DOI:10.1016/j.jfranklin.2011.07.020 |
| [6] |
Drake D, Xin M, Balakrishnan S N. New nonlinear control technique for ascent phase of reusable launch vehicles[J]. J of Guidance, Control, and Dynamics, 2004, 27(6): 930-937. DOI:10.2514/1.9058 |
| [7] |
Shao X, Wang H. Active disturbance rejection based trajectory linearization control for hypersonic reentry vehicle with bounded uncertainties[J]. ISA Trans, 2015, 54: 27-38. DOI:10.1016/j.isatra.2014.06.010 |
| [8] |
Haghighat S, Liu H H T, Martins J R R A. Model-predictive gust load alleviation controller for a highly flexible aircraft[J]. J of Guidance, Control, and Dynamics, 2012, 35(6): 1751-1766. DOI:10.2514/1.57013 |
| [9] |
Ansari U, Bajodah A H. Generalized dynamic inversion scheme for satellite launch vehicle attitude control[J]. IFAC-PapersOnLine, 2015, 48(9): 114-119. DOI:10.1016/j.ifacol.2015.08.069 |
| [10] |
Wang Z, Wu Z, Du Y. Robust adaptive backstepping control for reentry reusable launch vehicles[J]. Acta Astronautica, 2016, 126: 258-264. DOI:10.1016/j.actaastro.2016.04.015 |
| [11] |
Min C, Lee D, Cho K, et al. Control of approach and landing phase for reentry vehicle using fuzzy logic[J]. Aerospace Science and Technology, 2011, 15(4): 269-282. DOI:10.1016/j.ast.2010.07.006 |
| [12] |
Zhu L, Jiang C S, Fang W. Six-DOF modeling and simulation of a conceptual unmanned aerospace vehicle[J]. Aerospace Control, 2006, 24(4): 39-44. |
| [13] |
Gai W, Wang H, Zhang J, et al. Adaptive neural network dynamic inversion with prescribed performance for aircraft flight control[J]. J of Applied Mathematics, 2013, 2013: 1-12. |
| [14] |
Wang L X. Design and analysis of fuzzy identifiers of nonlinear dynamic systems[J]. IEEE Trans on Automatic Control, 1995, 40(1): 11-23. DOI:10.1109/9.362903 |
| [15] |
Tong S, He X, Li Y, et al. Adaptive fuzzy backstepping robust control for uncertain nonlinear systems based on small-gain approach[J]. Fuzzy Sets and Systems, 2010, 161(6): 771-796. DOI:10.1016/j.fss.2009.09.012 |
| [16] |
Kim D, Chung H, Bhasin S, et al. Robust composite adaptive fuzzy identification and control for a class of MIMO nonlinear systems[C]. American Control Conf. San Francisco: IEEE, 2011: 4947-4952.
|
| [17] |
Ge S S, Hang C C, Tong H L, et al. Stable adaptive neural network control[M]. Boston: Kluwer, 2001.
|
| [18] |
Phan P A, Gale T. Two-mode adaptive fuzzy control with approximation error estimator[J]. IEEE Trans on Fuzzy Systems, 2007, 15(5): 943-955. DOI:10.1109/TFUZZ.2006.890657 |