 2019, Vol. 34
2019, Vol. 34

近年来, 车辆主动悬架控制技术受到研究人员的极大关注, 很多重要研究成果[1-5]被相继提出.在车辆主动悬架控制中, 如何协调控制乘员平顺性和操纵稳定性问题已成为研究的热点[6-8], 这主要是由于上述性能之间存在必然的矛盾关系.然而, 传统的被动悬架和一般的主动控制方法难以满足悬架系统的综合控制要求.此外, 由于悬架系统本身具有诸多非线性因素和模型不确定性, 车辆在不同行驶道路条件(路面不平度)和工况(加速、制动和转弯)下, 悬架参数会在一定范围内发生变化, 这就使得对悬架系统的动态特性难以用精确数学模型来描述, 从而造成控制上的困难.为解决主动悬架的控制问题, 学者们对此进行了大量研究, 并提出诸如H∞控制[9-11]、变结构滑模控制[12]、自适应反推控制[13]以及基于T-S模糊模型[14]的控制方法等.在这些控制方法中, 由于H∞控制易于处理悬架系统的时域硬约束问题, 即在兼顾多项约束输出指标的前提下, 能够最大化抑制路面不平度引起的垂向振动, 因而应用该方法可较好地改善悬架的乘坐舒适性; 同时, H2控制在处理随机噪声和干扰方面很有效, 但其控制效果完全依赖于被控对象数学模型的精确性, 这限制了H2最优控制器的实际应用.目前, 单独以H∞和H2为控制指标的鲁棒控制器设计问题已在车辆悬架系统控制中得到较好解决[15-18].另外, 具有鲁棒稳定性和抗外界扰动的混合H2/H∞控制器开发也受到研究人员的关注[19-22].文献[19-20]为了改善车辆主动悬架的动态特性, 设计了一种基于线性矩阵不等式(Liner matrix inequality, LMI)的混合H2/H∞控制器, 并与应用H∞控制器的主动悬架进行对比分析, 但没有考虑主动悬架参数的摄动对控制器性能的影响; 文献[21-22]应用硬约束、H2性能、H∞性能以及极点配置等多约束设计了主动悬架混合H2/H∞控制器, 但没有考虑模型参数的不确定性问题.
针对以上问题, 本文提出一种考虑模型参数不确定性的主动悬架混合H2/H∞保性能状态反馈控制器设计方法.首先, 运用线性分式变换(Linear fractional transformation, LFT)方法建立包含参数不确定的主动悬架模型, 以车身垂向加速度作为车辆悬架系统的最小化输出目标(用H2范数来衡量), 将悬架动挠度约束和轮胎动载荷约束作为约束输出指标(用H∞范数来衡量); 然后, 运用保性能控制策略及Lyapunov理论设计出使主动悬架系统渐近稳定, 满足H2设计指标最小化的控制律, 即混合H2/H∞最优保性能控制律; 最后, 对比分析所提出的控制方法在随机路面和凸块路面激励下主动悬架系统的仿真结果, 同时在考虑悬架系统参数不确定性情况下, 通过对悬架系统各项性能指标均方根值的比较, 验证H2/H∞最优保性能控制策略的可行性和有效性.
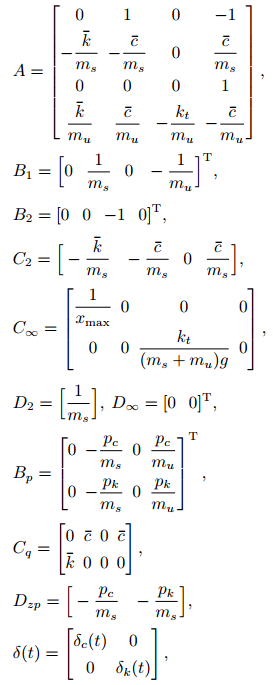
1 系统建模及问题描述为简化悬架系统动力学分析及控制器设计的复杂度, 参照文献[23], 建立二自由度悬架动力学模型如图 1所示, 它由悬架弹簧减振器和阻尼器组成被动部分.主动力u由液压伺服装置提供, 忽略作动器动态特性.其中: ms为悬挂质量; mu为非悬挂部分质量; xs、xu分别为悬挂质量和非悬挂质量的垂向位移; xr为路面位移输入; cs、ks分别为悬架结构阻尼和刚度; kt为轮胎刚度.

|
图 1 二自由度1/4车辆主动悬架模型 |
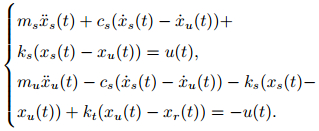
根据牛顿第二定律建立其动力学方程为
|
(1) |
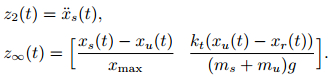
为保证被控悬架系统具有良好的性能, 车身垂向加速度(影响乘坐舒适性)、悬架动挠度(需满足机械限制)以及轮胎动位移(确保不间断的接地性)应具有较好的动态性能和安全约束, 具体如下:
1) 车身垂向加速度
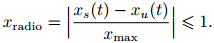
2) 考虑悬架系统机械结构的限制, 悬架动挠度最大不能超过机械结构的限制值, 即悬架动挠度约束.
|
(2) |
3) 为确保车轮与路面的不间断接触, 轮胎动载荷必须小于轮胎静载荷, 即轮胎动载荷约束.

|
(3) |
其中g为重力加速度, 且g=9.8 m· s-2.
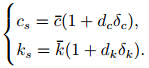
车辆主动悬架中主要参数不确定性包括悬挂质量ms、悬架结构阻尼cs和刚度ks, 在车身悬挂质量ms变化不大的情况下, 可忽略其对控制效果的影响.其他两者参数不确定性可由参数自身的名义值及其可能的摄动范围描述, 如下式所示:
|
(4) |
其中: c、k分别表示悬架阻尼和刚度的名义值; dc、dk分别表示参数的摄动值; δi(i=c, k)表示为时变函数, δi(t)用来描述两者的摄动范围且|δi(t)|≤1(i=c, k).通过线性分式变换[24], 式(4)中的cs和ks可分别表示为

|
(5) |

|
(6) |
由式(1)、(5)和(6)可得考虑参数不确定的1/4车辆主动悬架系统如图 2所示.

|
图 2 具有参数不确定性的1/4车辆主动悬架系统 |
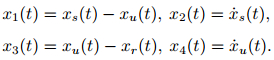
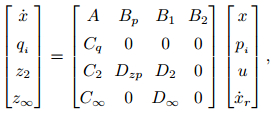
令状态空间变量为
|
定义主动悬架输出指标为
|
由图 2可得状态空间和qi→pi映射的关系如下:
|
(7) |

|
(8) |
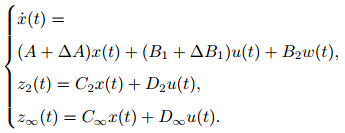
式(7)和(8)可转化为状态空间方程, 如下式所示:
|
(9) |
其中: x(t)=[x1(t) x2(t) x3(t) x4(t)]T为状态变量; w(t)=
|
|
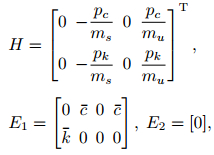
为将包含δc(t)和δk(t)的不确定矩阵ΔA和ΔB1的变量分离, 联立式(7)和(8)可将ΔA和ΔB1写成如下范数有界形式[25]:

|
(10) |
其中: H、E1、E2为适当维数的不确定实数矩阵, δ(t)∞L2[0, +∞]为范数有界时的变矩阵函数, 则
|
且满足
|
(11) |
I为适当维数的单位矩阵.令状态反馈控制律为
|
(12) |
应用控制律(12), 得到如下闭环系统:
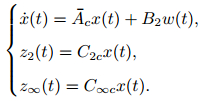
|
(13) |
其中
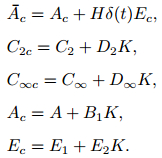
|
为闭环系统(13)设计一个形如式(12)的状态反馈控制律, 并考虑悬架系统参数不确定性, 使闭环系统(13)满足如下设计指标:
1) 闭环系统(13)是渐近稳定的.
2) 当w(t)被看成有限能量的扰动信号时, 从干扰输入w(t)到输出的闭环传递函数满足
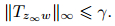
|
(14) |
其中: 
3) 当w(t)被看成单位强度零均值白噪声信号时, 从干扰输入w(t)到输出z2(t)的闭环传递函数‖Tz2w‖2的性能指标可表示为J(K), 其满足

|
(15) |
如果Ac是渐近稳定的, 则J(K)可以表示为
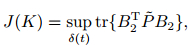
|
(16) |
其中

|
(17) |
其中J(K)表示闭环系统H2性能指标的上界.满足以上设计指标的控制律(12)称为系统(13)的H2/H∞保性能控制律.一般依赖于所选取的控制律, 使得最小化的控制律(12)称为系统(13)的混合H2/H∞最优保性能控制律.
在考虑悬架阻尼cs和刚度ks存在摄动的情况下, 为使所设计的H2/H∞保性能控制律满足主动悬架系统设计指标如式(14)和(15), 需应用如下两个引理的结论.
引理1[26] 给定矩阵Y、C、D, 满足Y+Cδ(t)D+DTδT(t)CT < 0.如果对于所有δ(t)满足δT(t)δ(t) ≤ I, 则当且仅当存在标量ε>0时, 有Y+εCCT+ε-1DTD < 0.
引理2[27] 任意给定适当维数的矩阵X、Y和∀β>0, 则满足

|
依此对如下两个定理进行证明, 从而针对车身垂向加速度、悬架动挠度约束和轮胎动载荷约束这3项悬架设计指标要求, 完成基于H2/H∞的主动悬架最优保性能控制律设计.
定理1 对于给定常数γ>0和系统(13), 存在一个保性能控制律(12), 当且仅当存在常数α>0、β>0以及矩阵V、正定矩阵X>0, 使得
|
(18) |
如果式(18)有一组可行解(α, β, V, X), 则状态反馈控制律为
|
(19) |
式(19)是闭环系统(13)的一个保性能控制律, 且闭环系统的一个H2保性能上界是

|
(20) |
其中
|
证明 应用连续时间的有界实引理, 如果存在正定矩阵P使得

|
(21) |
成立, 则可满足设计指标1)和指标2).同时存在标量β>0, 式(21)可等价为
|
(22) |
上式两边同乘以β-1, 并记P=β-1P, 则式(22)可等价为

|
(23) |
根据引理1, 式(23)对所有满足式(11)的不确定矩阵δ(t)成立, 当且仅当存在标量α>0使得

|
(24) |
令
|
由引理2及式(11)可得
|
由此, M≥0.式(23)减去(17)可得
|
(25) |
由M+βγ-2PB2B2TP + β-1C∞cTC∞c > 0、Ac的稳定性及Lyapunov稳定理论可知P-
取H2性能指标上界J(K)=tr(B2TPB2), 则J(K)≥tr(B2T
对式(24)两边同乘以P-1, 进而运用Schur补性质[28], 可得
|
(26) |
其中
|
将X=P-1和V=KP-1代入式(26), 可得式(18).
如果定理1成立, 则对于所有δ(t), 闭环系统(13)是渐近稳定的, 且‖Tz∞w‖∞≤γ, 式(18)中的正定阵X可保证H2性能指标J(K)满足
|
(27) |
定理2 对于具有不确定矩阵δ(t)的系统(13), 给定常数γ>0, 如果线性凸优化问题
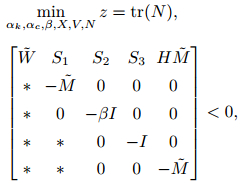
|
(28) |
|
(29) |
存在一组可行解(αk, αc, β, X, V, N), 则状态反馈控制律u(t)=VX-1x(t)是主动悬架系统的混合H2/H∞最优保性能控制律, H2保性能上界

|
其中
|
证明 由于不确定矩阵δ(t)具有块对角形式如下:

|
由式(11)可知, 其满足

|
令

|
式(10)等价于

|
运用Schur补性质, 式(18)等价于
|
将
根据定理1, 利用式(12)构造的控制律将保证闭环系统(13)满足设计指标1)和指标2), 并且H2性能指标满足J(K)≤tr(B2TX-1B2), 运用Schur补性质, 式(29)等价于B2TX-1B2 < N, 因此tr(N)的最小化将保证性能上界J(K)的最小化, 从而保证H2性能指标的最小化.
通过定理1和定理2的证明, 实现了混合H2/H∞最优保性能控制律u(t)=VX-1x(t)的设计, 不仅可以保证闭环系统(13)的渐近稳定, 在给定干扰抑制度γ时, ‖Tz∞w‖∞}≤γ, 即保证悬架动挠度约束xradio和轮胎动载荷约束Fradio在外部扰动下有一定的安全约束, 而且使J(K)最小化, 即在外部扰动下车身垂向加速度
为验证本文所提出的H2/H∞最优保性能状态反馈控制器的可行性和有效性, 考虑如图 1所示的二自由度主动悬架模型, 本文采用的某型号轿车的悬架参数如表 1所示.当悬架阻尼和刚度参数值不发生变化时, 将主动悬架模型称为名义悬架模型; 假定悬架阻尼和刚度摄动值分别为dc=0.2和dk=0.2, 称为不确定悬架模型.悬架最大允许的动挠度为xmax=0.1 m.
| 表 1 二自由度主动悬架参数 |
利用Matlab求解含参数不确定性的H2/H∞最优保性能控制律的状态反馈控制器增益矩阵. 图 3给出了不同扰动抑制度γ下, 闭环系统的H2保性能指标与扰动抑制度γ的关系.由图 3所示仿真曲线可见, J(K)与扰动抑制度γ是两个相互制约的指标, 扰动抑制度γ作为平衡H∞和H2保性能指标的权值.为了能够在最小化车身垂向加速的同时保证将悬架动挠度和轮胎动载荷约束限定在一定范围内, 经过若干次试验, 最终选取γ=30.另外, 为了更好地对比分析不同控制器的效果, 根据文献[19]的结论, 求解获得应用于该主动悬架系统的传统H2/H∞状态反馈控制律, 记为Controller Ⅰ.

|
图 3 H2保性能指标与扰动抑制度γ的关系 |
应用定理2的结论可求得闭环控制主动悬架系统(13)的混合H2/H∞最优保性能控制律为u(t)=103×[6.603 6, -2.747 3, -5.921 2, -0.239 5]x(t), 记为Controller Ⅱ.
3.1 随机路面响应为了验证应用本文所提出的Controller Ⅱ对主动悬架控制效果, 以高斯白噪声滤波得到的信号作为随机路面激励信号xr(t), 其时域表达式[29]为

|
(30) |
其中: G0为路面不平度系数; u为车辆前进速度(m/s); n0=0.1 m-1为参考空间频率; w(t)为单位强度的高斯白噪声; f0为滤波器下限截止频率(Hz).仿真所采用的输入信号为模拟的B级路面, 即G0=64×10-6 m3, 车速为u=10 m/s.
在B级随机路面扰动和名义悬架模型情况下, 对比分析Controller Ⅱ、Controller Ⅰ以及被动悬架(Uncontrolled)在车身垂向加速度、悬架动挠度约束以及轮胎动载荷约束方面的控制效果, 图 4(a) ~ 图 4(c)分别给出了相应的响应曲线.

|
图 4 随机路面响应曲线 |
从图 4(a)可以看出, 相较于Uncontrolled和Controller Ⅰ的主动悬架响应曲线, 在随机路面激励下, Controller Ⅱ具有更小的车身垂向加速度; 从图 4(b)可以看出, 悬架动挠度满足约束(2), 表明机械限制约束得到保证; 从图 4(c)可以看出, 由于3种指标输出之间相互矛盾, 轮胎动载荷有一定恶化现象, 但轮胎动载荷仍小于其静载荷, 满足约束(3), 依然能够确保车辆具有安全行驶性能.
3.2 凸块路面响应为进一步验证所提出控制器在凸块路面激励下的性能, 根据国际标准ISO2361, 选取短时间、高强度凸块路面作为扰动输入, 其表达式[30]为
|
(31) |
其中: Am和L分别代表凸块输入的高度和长度, 通常取Am=100 mm, L=5 m; 汽车以u=45 km/h车速匀速行驶. 图 5(a) ~ 图 5(c)分别为3种控制方式下的名义悬架模型的车身垂向加速度、悬架动挠度约束以及轮胎动载荷约束响应对比分析曲线.

|
图 5 凸块路面响应曲线 |
从图 5(a)可以看出, 相较于Uncontrolled和Controller Ⅰ, Controller Ⅱ具有更低车身垂向加速度响应峰值, 达到稳态的时间更短, 可更好地改善乘坐舒适性; 从图 5(b)和图 5(c)可以看出, 悬架动挠度小于xmax, 轮胎动载荷小于轮胎静载荷, 表明约束(2)和(3)得到保证, 从而可以有效地减少由于车轮的冲击而使悬架与限位块碰撞的次数, 降低悬架被“击穿”的概率, 提高车辆的操作稳定性.车辆驶过较大凸起路面时, 轮胎也不容易离开地面, 出现“轮跳”不安全现象.此外, 悬架动挠度约束和轮胎动载荷约束这两项输出指标波动幅度小, 稳定速度快, 具有较好的动态特性.
3.3 不确定性分析为评估所提出混合H2/H∞最优保性能控制系统对不确定悬架模型的鲁棒性, 将仿真时间设定为10 s, 分析在B级路面、车速10 m/s工况下两者发生不同变化(-20 %和+20 %)时主动悬架各项性能指标变化情况, 其均方根值对比结果如表 2所示.
| 表 2 悬架参数化引起的各项性能指标的均方根变化 |
由表 2可知, 当悬架阻尼(cs)从-20 %到+20 %变化时, Uncontrolled的3项性能输出指标变化幅度均不大, 说明其对悬架阻尼变化的敏感程度低.相较于Uncontrolled和应用Controller Ⅰ的悬架, 在悬架阻尼摄动量一定的情况下, 由于悬架系统固有特性, 性能指标之间存在制约关系, 不能同时达到最优, 轮胎动载荷约束指标的均方根有所增加, 但增加幅度很小, 依然能够确保车辆具有一定的安全行驶性能.同时, 应用Controller Ⅱ的主动悬架降低了车身垂向加速度和悬架动挠度约束, 均方根明显减少, 表明所提出的Controller Ⅱ能较好地降低悬架参数cs的不确定性带来的影响.当悬架刚度(ks)从-20 %到+20 %变化时, Uncontrolled的车身垂向加速度均方根从0.603 0 m· s2变为0.729 9 m·s2, 增加了21.04 %; 应用Controller Ⅰ, 均方根从0.496 4 m·s2变为0.575 6 m·s2, 增加了16.37 %; 应用本文设计的Controller Ⅱ主动悬架, 均方根从0.423 0 m·s2变为0.437 0 m·s2, 增加了3.3 %, 说明应用Controller Ⅱ的主动悬架车身垂向加速度指标对参数的敏感程度远低于Uncontrolled和应用Controller Ⅰ的悬架, 也说明本文所设计的控制器具有较好的鲁棒性.
4 结论1) 本文建立了基于LFT的悬架系统参数不确定模型, 提出了一种考虑参数不确定性的混合H2/H∞最优保性能控制策略, 并以LMI的形式给出了反馈控制参数的解, 进而设计出了一种在考虑H∞约束输出指标的给定扰动抑制程度γ条件下得到最小化H2性能指标的最优保性能状态反馈控制律.
2) 通过在随机和凸块路面激励下的仿真实验可知, 相较于被动悬架和最优H∞/H2控制, 本文提出的混合H2/H∞最优保性能控制具有更低的车身垂向加速度峰值, 悬架动挠度约束和轮胎动载荷约束两项输出指标也有明显改善, 不仅提高了车辆行驶平顺性, 而且满足悬架系统安全约束条件.
3) 考虑悬架参数摄动的情况, 通过对随机路面激励下各项性能指标均方根值的比较, 验证了所提出的控制策略可保证主动悬架具有良好的鲁棒性.
| [1] |
Li H, Liu H, Hand S, et al. Multi-objective control for vehicle active suspension systems with random actuator delay[J]. Int J of Systems Science, 2011, 43(12): 1-14. |
| [2] |
Pan H, Sun W, Gao H, et al. Finite-time stabilization for vehicle active suspension systems with hard constraints[J]. IEEE Trans on Intelligent Transportation Systems, 2015, 16(5): 1-10. DOI:10.1109/TITS.2015.2478704 |
| [3] |
姜伟, 王宏力, 陆敬辉, 等. 连续时间多胞线性变参数系统变增益H∞/H2输出反馈控制[J]. 控制理论与应用, 2016, 33(9): 1225-1235. (Jiang W, Wang H L, Lu J H, et al. Gain-scheduled H∞/H2 output feedback controller synthesis for continuous-time polytopic linear parameter varying systems[J]. Control Theory and Applications, 2016, 33(9): 1225-1235.) |
| [4] |
Sun W, Zhao Y, Li J, et al. Active suspension control with frequency band constraints and actuator input delay[J]. IEEE Trans on Industrial Electronics, 2012, 59(1): 530-537. DOI:10.1109/TIE.2011.2134057 |
| [5] |
Sun W, Zhao Z, Gao H. Saturated adaptive robust control for active suspension systems[J]. IEEE Trans on Industrial Electronics, 2013, 60(9): 3889-3896. DOI:10.1109/TIE.2012.2206340 |
| [6] |
Guo L X, Zhang L P. Robust H∞ control of active vehicle suspension under non-stationary running[J]. J of Sound and Vibration, 2012, 331(26): 5824-5837. DOI:10.1016/j.jsv.2012.07.042 |
| [7] |
Lauwerys C, Swevers J, Sas P. Design and experimental validation of a linear robust controller for an active suspension of a quarter car[C]. American Control Conf. Boston: IEEE, 2004: 1481-1486.
|
| [8] |
Takahashi M, Hiraoka S, Suzuki T. Gain-scheduling H∞ control to improve ride comfort and driving stability for vehicle active suspension[J]. Vehicle Engineering, 2014, 2: 21-30. |
| [9] |
Choi H D, Ahn C K, Lim M T. Dynamic output-feedback H∞ control for active half-vehicle suspension systems with time-varying input delay[J]. Int J of Control Automation and Systems, 2016, 14(1): 59-68. DOI:10.1007/s12555-015-2005-8 |
| [10] |
Fallah M S, Bhat R, Xie W F. H∞ robust control of active suspensions: A practical point of view[C]. American Control Conf. St. Louis: IEEE, 2009: 1385-1390.
|
| [11] |
Li H, Liu H. Multi-objective H∞ control for vehicle active suspension systems with random actuator delay[J]. Int J of Systems Science, 2012, 43(12): 2214-2227. DOI:10.1080/00207721.2011.566640 |
| [12] |
Wen S, Chen M Z Q, Zeng Z, et al. Fuzzy control for uncertain vehicle active suspension systems via dynamic sliding-mode approach[J]. IEEE Trans on Systems Man and Cybernetics Systems, 2017, 47(1): 24-32. DOI:10.1109/TSMC.2016.2564930 |
| [13] |
Sun W, Gao H, Kaynak O. Adaptive backstepping control for active suspension systems with hard constraints[J]. IEEE/ASME Trans on Mechatronics, 2013, 18(18): 1072-1079. |
| [14] |
Li H, Yu J, Hilton C, et al. Adaptive sliding-mode control for nonlinear active suspension vehicle systems using T–S fuzzy approach[J]. IEEE Trans on Industrial Electronics, 2013, 60(8): 3328-3338. DOI:10.1109/TIE.2012.2202354 |
| [15] |
Ghazaly N M, Ahmed A S, Ati A S, et al. H∞ control of active suspension system for a quarter car model[J]. Int J of Vehicle Structures and Systems, 2016, 8(1): 35-40. |
| [16] |
Choi S B, Han S S. H∞ control of electrorheological suspension system subjected to parameter uncertainties[J]. Mechatronics, 2003, 13(7): 639-657. DOI:10.1016/S0957-4158(02)00035-1 |
| [17] |
Turkay S, Akcay H. Influence of tire damping on the H2 optimally designed half-car active suspensions[C]. Int Conf on Control Applications. San Antonio: IEEE, 2008: 444-449.
|
| [18] |
Chen H, Ma M. Constrained H2 control of active suspensions using LMI optimization[C]. Chinese Control Conf. Harbin: IEEE, 2006: 702-707.
|
| [19] |
Abdellari E, Mehdi D, M'Saad M. On the design of active suspension system by H∞ and mixed H2/H∞: An LMI approach[C]. American Control Conf. Chicago: IEEE, 2000: 4041-4045.
|
| [20] |
Badran S M. Robust LMI-based controller design using H∞ and mixed H2/H∞ for semi-active suspension system[J]. Editorial Committees, 2012, 2(8): 172-180. |
| [21] |
Orukpe P E, Zheng X, Jaimoukha I M, et al. Model predictive control based on mixed H2/H∞ control approach for active vibration control of railway vehicles[J]. Vehicle System Dynamics, 2008, 46(S1): 151-160. |
| [22] |
Akcay H, Turkay S. Influence of tire damping on mixed H2/H∞ synthesis of half-car active suspensions[J]. J of Sound and Vibration, 2009, 322(1): 15-28. |
| [23] |
Sun W, Gao H, Kaynak O. Finite frequency H∞ control for vehicle active suspension systems[J]. IEEE Trans on Control Systems Technology, 2011, 19(2): 416-422. DOI:10.1109/TCST.2010.2042296 |
| [24] |
张勇超.车辆电磁主动悬架鲁棒控制研究[D].上海: 上海交通大学机械与动力工程学院, 2012. (Zhang Y C. Study on robust control for vehicle active electromagnetic suspension[D]. Shanghai: School of Mechanical and Power Engineering, Shanghai Jiao Tong University, 2012.) |
| [25] |
张志勇, 刘鑫, 黄彩霞, 等. 具有参数不确定性的车辆座椅悬架H∞输出反馈半主动控制[J]. 振动与冲击, 2013, 32(14): 93-97. (Zhang Z Y, Liu X, Huang C X, et al. H∞ output feedback semi-active control for a vehicle seat suspension with parametric uncertainty[J]. Vibration and Shock, 2013, 32(14): 93-97. DOI:10.3969/j.issn.1000-3835.2013.14.016) |
| [26] |
Khargonekar P P, Petersen I R, Zhou K. Robust stabilization of uncertain linear systems: Quadratic stability and H∞ control theory[J]. IEEE Trans on Automatic Control, 1990, 35(3): 356-361. DOI:10.1109/9.50357 |
| [27] |
Petersen I R, Anderson BDO, Jonckheere E A. A first principles solution to the non-singular H∞ control problem[J]. Int J of Robust and Nonlinear Control, 1991, 1(3): 171-185. DOI:10.1002/(ISSN)1099-1239 |
| [28] |
Jbilou K, Messaoudi A, Taba K. Some schur complement identities and applications to matrix extrapolation methods[J]. Linear Algebra & Its Applications, 2004, 392(1): 195-210. |
| [29] |
江洪, 李仲兴, 周文涛, 等. 基于遗传算法的ECAS系统中三级阻尼匹配优化设计[J]. 机械工程学报, 2009, 45(10): 278-283. (Jiang H, Li Z X, Zhou W T, et al. Optimum match design of tri-grade adjustable damper in ECAS system based on genetic algorithm[J]. J of Mechanical Engineering, 2009, 45(10): 278-283.) |
| [30] |
Chen H, Guo K H. Constrained H∞ control of active suspensions: An LMI approach[J]. IEEE Trans on Control Systems Technology, 2005, 13(3): 412-421. DOI:10.1109/TCST.2004.841661 |