 2020, Vol. 35
2020, Vol. 35

近年来, 由于通信、嵌入式技术的快速发展, 四旋翼无人机作为一种新型的开发研究及应用平台, 引起了众多学者的广泛关注.由于具有体积紧凑、机动灵活、可自主飞行等优势[1], 四旋翼无人机已广泛应用于各个领域.在应用方面, 四旋翼无人机可进入危险的复杂环境代替人类执行军事侦查、边境巡逻和灾害救援等任务, 可携带检测传感设备进行气象勘测、地形绘制、巡检防护等工作.在研究领域, 作为一种研究平台, 可进行姿态检测、轨迹跟踪、智能控制等研究, 具有重要的研究价值.然而, 由于四旋翼无人机的非线性、强耦合和欠驱动等特性, 使得位置轨迹跟踪控制系统的设计具有挑战性[2].
目前, 针对四旋翼无人机的控制问题, 已提出一系列不同的控制策略.文献[3-4]分别提出线性PID算法和自适应PID算法, 通过仿真验证所设计控制策略在不同干扰情况下的有效性和稳定性.但是线性控制方法难以保证系统全局稳定性, 处理系统耦合和不确定性干扰的能力有限, 难以满足复杂环境下的飞行控制要求.
为此, 众多学者寻求非线性控制算法实现对四旋翼无人机的控制.文献[5-6]分别采用反步法和自适应设计四旋翼无人机控制律, 实现了位置及姿态的稳定跟踪控制.但是, 所设计控制系统响应速度慢, 对外部扰动灵敏, 不能实现渐近跟踪和干扰抑制.
针对非线性系统的渐近跟踪及干扰抑制问题, 输出调节理论中的内模原理是一种行之有效的解决方法[7-11].其中文献[8]应用内模原理设计四旋翼无人机的姿态控制器, 通过仿真和实验验证了姿态的渐近跟踪和干扰抑制.当被控系统存在未知参数时, 文献[9]采用输出调节验证了航天器在干扰频率未知情况下的扰动抑制问题.文献[10]利用一类非线性内模解决非线性系统的全局鲁棒输出调节问题.
滑模控制(sliding mode control, SMC)因其鲁棒特性, 对扰动不灵敏及可简化控制器设计等优点, 逐渐成为非线性系统控制的热点方法.然而, 滑模控制的不连续开关特性会引起系统的抖振, 为了解决这一弊端, 国内外学者做了大量探索, 如采用边界层法、趋近律方法或结合模糊控制、神经网络等方法.其中边界层法只能保证系统状态收敛到以滑模面为中心的边界层内, 且边界层的引入会导致稳态误差出现, 降低系统鲁棒性; 采用趋近律方法抑制抖振与参数调整相关, 若参数调整不当, 其抑制和削弱抖振效果不明显; 结合智能控制方法对削弱系统抖振起到了一定作用, 但设计过程复杂, 已不是理论上理想的滑模控制器, 而是被特殊控制器所替代的近似滑模控制器.为完全消除抖振现象, 近年来提出了多种形式的高阶滑模(higher order sliding mode, HOSM)控制方法[12-20], 与上述方法不同之处在于:高阶滑模是从滑模控制的本质出发, 将不连续控制输入应用于滑模面的高阶微分中, 使得控制量是本质连续的, 在很大程度上抑制抖振甚至消除抖振.
综合现有研究成果, 本文以内模原理和高阶滑模控制为基础, 引入动态面控制, 设计四旋翼无人机双环控制系统, 所提出的控制策略能够有效实现轨迹的渐近跟踪和干扰抑制, 并实现全局有限时间收敛.本文的主要工作包括: 1)采用基于动态面内模法(dynamic surface internal mode, DSIM)的输出调节器实现位置子系统的控制; 2)采用高阶滑模对姿态进行控制, 削弱系统抖振, 实现有限时间收敛; 3)采用一种鲁棒精确微分器, 对姿态角指令信号进行更加精准的求导, 提高控制精度.
1 四旋翼无人机动力学模型与分析建立四旋翼无人机动力学模型, 首先确定两个坐标系:惯性坐标系{E(OEXEYEZE)}和机体坐标系{B(OBXBYBZB)}, 如图 1所示.假设四旋翼无人机是刚体, 可通过惯性坐标系与机体坐标系之间的关系描述其运动状态.

|
图 1 惯性坐标系与机体坐标系结构示意 |
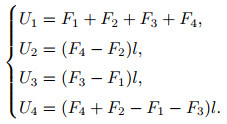
四旋翼无人机的4个控制输入为
|
(1) |
其中: l为旋翼转子与无人机质心之间的距离; Fi(i = 1, 2, 3, 4)为每个电机所产生的升力.
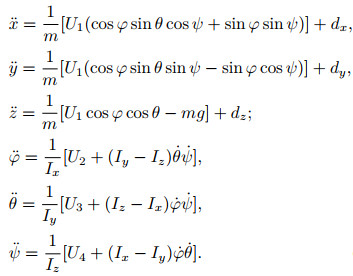
利用牛顿-欧拉方程, 四旋翼无人机动力学模型可分为位置动力学和姿态动力学两部分, 即
|
(2) |
其中: ϑ={[x, y, z]T为四旋翼无人机在惯性坐标系下的位置坐标; ϖ={[φ, θ, ψ]T为四旋翼无人机的姿态角, 即横滚角、俯仰角、偏航角; Ix、Iy、Iz分别为绕机体坐标系x、y、z轴的转动惯量; dx、dy、dz为扰动; m为无人机质量; g为重力加速度.
在动力学模型中, U1被分配到x、y、z三个方向的位移量中, U2、U3、U4分别被分配到3个姿态角通道的输入量中, 整个控制系统可以分解成由U1组成的位置控制和由U2、U3、U4组成的姿态控制.因此, 将控制系统设计为双环控制回路, 外环为位置回路设计, 采用基于动态面内模法的输出调节器进行控制; 内环为姿态控制回路, 采用高阶滑模进行控制.
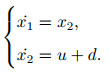
2 位置控制器设计 2.1 系统状态方程及外系统四旋翼无人机位置动力学方程用系统状态方程表示如下:
|
(3) |
其中: x1=[x, y, z]T, 
系统的参考输入和扰动由以下外系统产生:

|
(4) |
其中: r(t)和d(t)分别为生成参考输入R(ω)及扰动D(ω)的外系统, 
假设1 外系统是中性稳定的, 即系统的平衡点ω=0是稳定平衡点, Sω的所有特征根均在虚轴上.
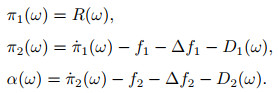
2.2 位置系统内模设计 2.2.1 计算零误差不变流形针对系统模型(3)和外系统(4), 存在一个全局定义的解x = π (ω), u = α (ω)满足
|
(5) |
式(5)表示状态空间中一个受控不变子流形, 在此流形上的调节误差恒为零. fi为未知连续函数, Δfi为包含未建模动态的不确定项, α (ω)为流形前馈项, 用于扰动抑制.当此流形为受控不变的零误差流形时, 输出调节问题就转换为设计误差反馈控制律保证流形的吸引性问题.
定义状态变换σ = x - π (ω), 有
|
(6) |
则由式(3)和(5)可得如下系统:
|
(7) |
由于用于扰动抑制的前馈项α (ω)不可量测, 需对此项进行重构, 作如下假设.
假设2 存在一个正整数q和一组实数a0, a1, ..., aq - 1, 其多项式是Hurwitz的, 即

|
(8) |
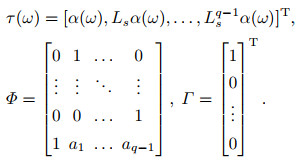
在假设2的条件下, 外系统可浸入如下可观测系统:
|
(9) |
其中
|
可见, 内模原理将前馈控制量浸入一个中性稳定系统中, 浸入过程与α(ω)的Lie导数满足的多项式有关, 因此对于被控对象受到的不确定性干扰具有鲁棒性.
基于线性观测器理论, 对于任意可控矩阵对(M, N), N∈Rq × 1}, M ∈ Rq × q}为Hurwitz矩阵, 因为(Φ, Γ)是可观测的, 故存在一个非奇异矩阵T满足以下Sylvester方程:
|
(10) |
令ϕ=Γ{T - 1}, η=Tτ, 利用确定性等价原则得到内模的标准参数化形式如下:
|
(11) |
为补偿过程中不确定因素, 选取具有误差项的内模形式
|
(12) |
作为调节器的内模部分, 其中i(·)为待设计误差函数.因此, 位置控制系统的输出调节器设计转化为对增广系统进行镇定控制器设计, 有

|
(13) |
本节对等效误差系统设计反馈控制律, 保证在原点的镇定性.对于增广系统(13), 以纵向高度通道为例, 首先采用动态面设计控制器, 可以有效防止“计算爆炸”问题.
step 1:设ez1 = σz1 - σz1d, 取σz1d = 0.选取关于ez1的Lyapunov候选函数

|
(14) |
则有

|
(15) |
设计虚拟控制
|
(16) |
其中kz1为待设计的控制器参数.
将σz2通过一阶滤波器, 有
|
(17) |
其中: σz2d(0) = σz2(0), τ > 0为待设计控制器参数.
定义ez2 = σz2 - σz2d, yz2 = σz2d - σz2, 选取Lyapunov候选函数
|
(18) |
则
|
(19) |
类似文献[21], 可以证明:假定∀ p> 0, 对一切V(0)≤ P, 存在正增益常数k1, k2, ..., kn和有限正时间常数τ2, τ3, ..., τi, 使得

|
(20) |
其中: a0>nε/p, ε>0.
step 2:定义
|
(21) |
则由式(11)和(12)得到

|
(22) |
选取全局Lyapunov候选函数
|
(23) |
其中Q为正定矩阵, 满足MTQ + QM = - 2kI, k>0, 则Vz对时间的导数满足下式:

|
(24) |
选取i(·) = - Nkz2ez2 - (M + Nϕ)Nez2, 内模设计为

|
(25) |
由式(7)、(11)和(25)得到

|
(26) |
设计纵向高度控制律为

|
(27) |
水平位置中x轴和y轴控制律的推导与z轴类似, 分别为
|
(28) |
由四旋翼位置动力学方程可推导出总推力U1、ϕd和θd, 分别为

|
(29) |

|
(30) |

|
(31) |
在本节中, 设计基于高阶滑模的姿态控制器, 实现系统快速收敛, 有效消除系统抖振, 保证闭环系统的稳定性.
首先, 定义姿态跟踪误差为e = [eφ, eθ, eψ]T, 其中

|
(32) |
由于四旋翼无人机姿态系统相对阶为2, 为实现有限时间收敛, 消除系统抖振, 选取高阶滑模控制器阶数为3阶.以滚转通道为例设计控制器, 选取滑模面为

|
(33) |
对滑模面进行二阶微分, 有
|
(34) |
根据四旋翼无人机姿态动力学方程, 式(34)可转化为
|
(35) |
将式(35)整理为如下形式:

|
(36) |
其中: 
控制量U2首次出现在滑模面的二阶微分中, 然而, 滑模面的阶数与系统相对阶相同, 所以抖振现象并没有消除.
为消除系统抖振, 对式(36)求导, 可得
|
(37) |
其中
由上可知, 需要φd的高阶微分信息, 由于其解析求导过程复杂, 为此, 在文献[17]基础上, 本文采用如下鲁棒精确微分器:
|
(38) |
其中: λ1、λ2、λ3为待选取参数, Z0、Z1、Z2、Z3分别为
选取局部变量ν1 ∈R, ν2 ∈R, ν3 ∈R, 则滑模方程表示为
|
(39) |
则可得Vφ为

|
(40) |
其中ωnom为待设计的辅助控制输入, 可选为[17]

|
(41) |
β1, β2, β3均大于0, 且要保证多项式λ3 + β3λ2 + β2λ + β1满足Hurwitz稳定性判据, αi(i = 1, 2, 3)满足
为保证全局鲁棒性, 设计如下积分高阶滑模控制器, 选取积分滑模面为

|
(42) |
其中ν3(t0)为初始值.
在滑模面上, 满足
|
(43) |
根据式(37)、(40)和(42), 可得

|
(44) |
同理
|
(45) |
为方便分析, 引入下列引理, 其证明参见文献[17, 22].
引理1[22] 对被控系统(3)和外系统(4), 在假设1和假设2满足的前提下, 存在式(17)、(25)、(26)解决非线性系统的输出调节问题, 并使闭环系统的信号全局最终有界, 调节误差渐近趋于零.
引理2[17] 对于系统(39), 控制律(40)可以保证系统在有限时间内到达滑动模态.
定理1 在滑模上, 若控制律(40)应用于系统(39), 则状态变量ν1、ν2、ν3可在有限时间内收敛至0.
证明 定义Lyapunov方程

|
(46) |
根据式(41)、(42)和(46), 可得
|
(47) |
故所设计控制器可以在时保证系统各状态变量运动在滑模面上.
令k1, k2, ..., kn > 0, 使得Sn + knSn - 1 +... + k2s + k1为Hurwitz多项式, 考虑如下系统[22]:

|
(48) |
对于系统(48), 存在ε ∈ (0, 1), 对∀ α ∈ (1 - ε, 1), 反馈u = χα (x1, ..., xn) = - k1signx1|x1|α1 -... - knsignxn|xn|αn是全局有限时间稳定的, 其中α1... αn满足
在滑模面上, 

|
(49) |
并由式(41)中ωnom所满足的条件可得证系统(49)的有限时间稳定性.
5 仿真结果及分析本节将采用Matlab/Simulink仿真验证本文所提出控制策略的有效性和鲁棒性.仿真对象采用ASC TEC公司生产的Hummingbird drones, 无人机参数及控制器参数如下:
|
外系统为
|
(50) |
则外系统可浸入如下可观测线性系统:
|
(51) |
其中




由式(25)可得设计内模为

|
(52) |
其中
由式(16)和(17)可设计滤波器为

|
(53) |
其中σ1 = ϑ - ϑd.
本文进行3组仿真, 仿真1是在无任何干扰存在的情况下, 分别与双环PID控制系统(PID+PID)和双环滑模控制系统(SMC+SMC)进行轨迹跟踪性能对比, 验证本文所设计控制策略(DSIM+HOSM)的优越性; 在仿真2和仿真3中分别对以上3种控制系统的位置环加入小幅值正弦波干扰信号和随机白噪声, 验证本文所设计控制系统的鲁棒性.
四旋翼无人机从惯性坐标系原点(xE, yE, zE)=(0, 0, 0)沿由外系统所产生期望轨迹[xd, yd, zd, ψd] = [3sin t, 3sin t, 3sin t, sint]飞行, 横滚角φ和俯仰角θ最终收敛到0, 实现姿态平稳, 达到稳定跟踪期望轨迹的目的.
仿真1 轨迹跟踪控制性能对比.
在无任何干扰存在的情况下, 位置和偏航角轨迹跟踪仿真对比结果如图 2所示.

|
图 2 x, y, z, ψ跟踪仿真对比结果 |
图 2表明, 在无干扰存在的情况下, 本文所设计控制系统可分别使位置轨迹X、Y、Z和偏航角ψ在1.5 s和2 s左右到达并稳定在参考值, 实现对轨迹的快速无误差跟踪; 用PID算法所设计的控制器使位置和偏航角分别在4 s和6 s时跟踪至参考值, 且均出现超调现象, 位置最大超调量为0.1 m, 偏航角最大超调量为0 3°; 利用传统滑模算法所设计的控制器在大约13 s时可使位置跟踪至参考轨迹, 大约9 s时偏航角ψ跟踪上ψd, 且位置和偏航角的跟踪误差较大, 位置跟踪误差范围在0.25 m之内, 偏航角最大跟踪误差为0 7°.由跟踪快速性和跟踪误差两方面表明, 本文所设计的无人机控制系统位置及姿态跟踪响应快速, 可以在无人机控制过程中实现对期望轨迹快速且稳定的跟踪.
图 3给出了3种控制策略下横滚角φ及俯仰角θ在四旋翼无人机轨迹跟踪过程中的变化曲线.结果显示, 利用PID控制和普通滑模控制所产生的横滚角和俯仰角在四旋翼起飞时变化较大, 在轨迹跟踪过程中逐渐收敛至0, 分别在4 s和2.5 s左右实现姿态平稳; 而利用本文所设计控制策略产生的横滚角和俯仰角可在1 s之内无波动渐近收敛至0, 实现姿态快速平稳, 达到稳定跟踪期望轨迹的目的.

|
图 3 横滚角φ和俯仰角θ仿真对比结果 |
图 4为本文所设计控制策略的U2、U3、U4仿真结果.由图 4可知, U2的变化曲线较为平和, 在± 0.004 N·m范围内平缓波动, 抖振频率明显降低, 而U3和U4则完全消除抖振现象, 收敛至0.结果表明, 高阶滑模控制方法可有效削弱甚至抑制系统的抖振现象.

|
图 4 控制量仿真结果 |
仿真2 正弦波信号干扰下的轨迹跟踪对比.
在仿真2中, 对3种控制系统各位置通道加入相同的正弦波干扰信号, 分别为dx = dy = dz = 0 5sin t, 其仿真对比结果如图 5所示.结果表明, 在相同正弦波信号扰动存在的情况下, 不同控制策略下的轨迹跟踪效果不同, 无人机各位置状态变量均出现一定的跟踪误差, 但利用本文所设计控制策略仍可实现对期望轨迹的渐近稳定跟踪, 最大误差范围在0.2 m之内, 对轨迹的跟踪效果和抗扰能力明显优于PID控制和普通滑模控制, 所设计控制器可有效实现干扰抑制, 具有一定的鲁棒性.

|
图 5 正弦波干扰下轨迹跟踪仿真对比结果 |
仿真3 白噪声干扰下的轨迹跟踪对比.
在仿真3中, 对3种控制系统各位置通道加入噪声功率为0.1 dB、采样时间为4 s的白噪声干扰, 进一步验证本文所设计控制器的鲁棒性.其仿真对比结果如图 6所示.

|
图 6 白噪声干扰下轨迹跟踪仿真对比结果 |
由图 6可知, 当无人机受到持续的白噪声干扰后, 本文所设计控制器的各位置变量仅在大约5 s和8 s时出现较大的跟踪误差, 此后误差明显减小并收敛至参考值, 实现扰动抑制和对期望轨迹的渐近稳定跟踪; 而PID控制和普通滑模控制则对持续干扰的抑制能力较弱, 轨迹跟踪过程中误差较大且未能消除.仿真结果表明, 当无人机受到较大的外界干扰后, 本文所设计控制系统仍能进行有效的干扰抑制, 减弱跟踪误差直至输出值收敛至参考值, 进一步验证了本文所设计控制系统的鲁棒性和优越性.
6 结论本文针对六自由度四旋翼无人机, 提出了一种双环控制系统.首先采用基于动态面内模法的输出调节器对无人机进行位置控制, 实现了位置跟踪响应速度快, 达到渐近干扰抑制, 保证飞行器渐近跟踪期望轨迹的目的.其次, 姿态控制采用积分高阶滑模控制方法, 可有效消除系统抖振, 实现各状态变量有限时间收敛.对系统稳定性进行了严格的数学证明, 通过与PID控制和普通滑模控制进行Matlab/Simulink仿真对比, 验证了本文所设计控制系统在四旋翼无人机轨迹跟踪控制中的有效性和鲁棒性.
| [1] |
Dong W, Gu G Y, Zhu X Y, et al. Modeling and control of a quadrotor UAV with aero-dynamic concepts[J]. International Journal of Mechanical, Aerospace, Industrial, Mechatronic and Manufacturing Engineering, 2013, 7(5): 901-906. |
| [2] |
Chen F Y, Jiang R Q, Zhang K K, et al. Robust backstepping sliding-mode control and observer-based fault estimation for a quadrotor UAV[J]. IEEE Transactions on Industrial Electronics, 2016, 63(8): 5044-5056. |
| [3] |
Zuo Z Y. Trajectory tracking control design with command-filtered compensation for a quadrotor[J]. IET Control Theory and Application, 2010, 4(11): 2343-2355. DOI:10.1049/iet-cta.2009.0336 |
| [4] |
Pounds P E I, Bersak D R, Dollar A M. Stability of small-scale UAV helicopters and quadrotor with added payload mass under PID control[J]. Autonomou Robots, 2012, 33(1/2): 129-142. |
| [5] |
Das A, Lewis F, Subbarao K. Backstepping approach for controlling a quadrotor using Lagrange form dynamics[J]. Journal of Intelligent and Robotic Systems, 2009, 56(1/2): 127-151. |
| [6] |
Dydek Z T, Annaswamy A M, Lavretsky E. Adaptive control of quadrotor UAVs: A design trade study with flight evaluations[J]. IEEE Transaction on Control Systems Technology, 2013, 21(4): 1400-1406. DOI:10.1109/TCST.2012.2200104 |
| [7] |
Lu M B, Huang J. A class of nonlinear internal models for global robust output regulation problem[J]. International Journal of Robust Nonlinear Control, 2015, 25(12): 1831-1843. DOI:10.1002/rnc.3180 |
| [8] |
Qiang Gao, Mei Du, Yuehui Ji. The controller design of quadrotor UAV based on internal mode control[C]. The 36th Chinese Control Conference. Dalian, 2017: 505-510.
|
| [9] |
Chen Z Y, Huang J. Attitude tracking of rigid spacecraft subject to disturbances of unknown frequencies[J]. International Journal of Robust Nonlinear Control, 2014, 24(16): 2231-2242. DOI:10.1002/rnc.2983 |
| [10] |
Xi Z R, Ding Z J. Global adaptive output regulation of a class of nonlinear systems with nonlinear exosystems[J]. Automatica, 2007, 43(1): 143-149. DOI:10.1016/j.automatica.2006.08.011 |
| [11] |
Xi Y, Huang J. Output regulation of time-varying nonlinear systems[C]. The 29th Chinese Control Conference. Beijing: IEEE, 2010: 5833-5838.
|
| [12] |
马克茂. 大型空间飞行器的高阶滑模姿态控制律设计[J]. 控制与决策, 2013, 28(2): 201-204. (Ma K M. Design of higher order sliding mode attitude control laws for large-scale spacecraft[J]. Control and Decision, 2013, 28(2): 201-204.) |
| [13] |
王亮, 刘向东, 盛永智. 基于高阶滑模观测器的自适应时变滑模再入姿态控制[J]. 控制与决策, 2014, 29(2): 281-286. (Wang L, Liu X D, Sheng Y Z. High-order sliding mode observer based adaptive time-varying sliding mode for re-entry attitude control[J]. Control and Decision, 2014, 29(2): 281-286.) |
| [14] |
何大阔, 高飞雪, 杨乐, 等. 一类未知MIMO非线性离散系统的改进自适应准滑模解耦控制[J]. 控制与决策, 2016, 31(5): 783-789. (He D K, GAO F X, Yang L, et al. Improved adaptive quasi-sliding mode decoupling control for a class of unknown MIMO nonlinear discrete-time systems[J]. Control and Decision, 2016, 31(5): 783-789.) |
| [15] |
赵占山, 张静, 孙连坤, 等. 一类非线性不确定系统高阶滑模自适应控制设计[J]. 控制与决策, 2011, 26(8): 1277-1280. (Zhao Z S, Zhang J, Sun L K, et al. Higher order sliding mode control with self-tuning law for a class of uncertain nonlinear systems[J]. Control and Decision, 2011, 26(8): 1277-1280.) |
| [16] |
范金锁, 张合新, 王桂明, 等. 一种高阶滑模控制算法的改进及应用[J]. 控制与决策, 2011, 26(9): 1436-1440. (Fan J S, Zhang H X, Wang G M, et al. Improvement of higher order sliding mode control and its application[J]. Control and Decision, 2011, 26(9): 1436-1440.) |
| [17] |
Pyare Mohan Tiwari, Janardhanan S, Mashuq un Nabi. Attitude control using higher order sliding mode[J]. Aerospace Science and Technology, 2016, 54: 108-113. DOI:10.1016/j.ast.2016.04.012 |
| [18] |
Pyare Mohan Tiwari, Janardhanan S, Mashuq un Nabi. Rigid spacecraft attitude control using adaptive integral second order sliding mode[J]. Aerospace Science and Technology, 2015, 42: 50-57. DOI:10.1016/j.ast.2014.11.017 |
| [19] |
Lu K F, Xia Y Q. Finite-time attitude stabilization for rigid spacecraft[J]. International Journal of Robust Nonlinear Control, 2015, 25(1): 32-51. |
| [20] |
Ma K M. Comments on: Quasi-continuous higher order sliding-mode controllers for spacecraft attitude tracking maneuvers[J]. IEEE Transactions on Industrial Electronics, 2013, 60(7): 2771-2773. |
| [21] |
Swaroop D, Hedrick J K, Yie, et al. Dynamic surface control for a class of nonlinear systems[J]. Automatic Control, 2000, 45(10): 1893-1899. DOI:10.1109/TAC.2000.880994 |
| [22] |
孟桂芝, 马克茂. 一类不确定非线性系统的动态面输出调节方法[J]. 电机与控制学报, 2011, 15(5): 103-108. (Meng G Z, Ma K M. Dynamic surface output regulation method for a class of uncertain nonlinear systems[J]. Electric Machines and Control, 2011, 15(5): 103-108. DOI:10.3969/j.issn.1007-449X.2011.05.016) |