 2020, Vol. 35
2020, Vol. 35

2. 江南大学 轻工过程先进控制教育部重点实验室,江苏 无锡 214122
2. Key Laboratory of Advanced Control for Light Industry Processes of Ministry of Education, Jiangnan University, Wuxi 214122, China
非仿射系统广泛存在于现实生活中, 且具有复杂性和不确定性等特点.非仿射系统中, 控制输入以非线性隐含的方式影响系统动态特性, 意味着无法以设计仿射系统控制输入的方法设计非仿射系统的控制器.目前, 非仿射非线性系统的跟踪控制研究主要分为两大类:模型未知和模型已知.就基于模型的非仿射非线性系统控制器设计而言, 传统的处理手段有反馈线性化[1]、逆系统[2]、中值定理[3]、自抗扰[4]等方法.文献[2, 5]首先求解对象的逆系统方程, 然后通过补偿使得复合系统成为线性或接近线性的系统, 该方法要求系统有比较精确的数学模型.文献[3, 6]采用隐函数定理和中值定理将非仿射系统转化成仿射系统, 并利用backstepping方法给出控制器结构; 文献[7]利用中值定理将非仿射系统转换为含有未知非线性以及控制增益未知的仿射系统, 然后利用自适应神经网络和Nussbaum函数设计了控制器.相较于文献[3, 6-7]中非仿射系统的处理方法, 文献[8]松弛了对非仿射系统可微的要求, 使非仿射系统的研究更具普遍性.同时, 文献[3, 6-7]均假设控制量足够大且存在难以实现高精度、大范围跟踪控制.因此, 进一步研究非仿射非线性系统的控制问题具有重要的理论和实际意义.
由于物理故障、状态饱和、性能和安全规程等原因, 状态受限普遍存在于实际应用.现有可处理约束的方法包括参考轨迹规划法[9]、基于不变集或容许集的控制[10-11]、超驰控制[12]、模型预测控制[13]等, 但文献[9-13]的核心思路为数值计算, 且计算较复杂.文献[14-15]针对含状态约束的Brunovsky标准型系统, 以约束区间作为定义域, 在反正切型及障碍函数基础上构造控制Lyapunov函数, 并利用backstepping方法设计了系统控制器; 文献[16]对于非对称时变输出受限的严格反馈系统, 提出控制策略, 实现了输出渐近跟踪; 文献[17]利用RBF干扰观测器、障碍Lyapunov函数和Nussbaum函数相结合的方法, 实现了一类状态和输入受限严格反馈系统的控制器设计; 文献[18]在障碍Lyapunov函数理论成果基础上, 采用快速terminal滑模方法给出了攻角约束条件下的导弹导引律设计过程.然而, 文献[14-18]均是针对仿射非线性系统, 目前开展状态/输入受限非仿射非线性系统控制研究仍然较少.同时, 非仿射非线性系统在实际中广泛存在, 结合实际情况对系统本身性能及安全等的要求, 研究受限非仿射非线性系统的控制问题具有重要的意义.
此外, 因系统建模误差、参数不确定和外部扰动的存在, 使得基于神经网络或模糊系统的干扰观测器被广泛研究, 如文献[19-22].然而, 为保证未知扰动估计的准确性, 文献[19-22]需选择大量的基函数中心和宽度等参数, 这势必会引起在线计算的复杂度.为此, 文献[23-25]分别利用小脑模型、Petri网、差分进化算法等研究模糊神经网络(fuzzy neural networks, FNN).然而, 文献[23-25]存在设计过于复杂且均忽略了因隶属度函数选择不合理引起估计不准的问题.因此, 在文献[23-25]基础上, 给出一种准确的干扰估计方法在工程应用方面是很有必要的.
基于上述分析, 针对一类状态受限的不确定非仿射非线性系统, 提出一种基于递归扰动模糊神经网络干扰观测器的backstepping控制策略.本文主要的创新点如下:
1) 为便于干扰观测器和控制器的设计, 利用Taylor级数展开, 给出一种适用于全局的非仿射非线性系统近似方法.相较于中值定理、隐函数定理等方法, 本文所给近似方法不存在展开点未知的问题.
2) 受文献[26]的联想层数学习算法启发, 将FNN、回归网络(recurrent neural networks, RNN)和扰动函数各自的优势相结合, 并结合投影算子, 提出一种基于递归扰动模糊神经网络的干扰观测器设计方法(recurrent perturbation fuzzy neural networks disturbance observer, RPFNNDO).松弛了FNN对隶属函数选择的条件, 实现了系统复合扰动进行在线逼近, 并设计鲁棒项抑制神经网络逼近误差的影响.
3) 基于以上近似方法和RPFNNDO, 借助障碍型函数及Nussbaum函数, 利用backstepping方法, 给出状态/输入受限的不确定严格反馈非仿射非线性系统控制器的设计过程.
1 问题描述及等价变换考虑一类状态/输入受限的不确定非仿射非线性系统如下:

|
(1) |

|
(2) |
|
(3) |
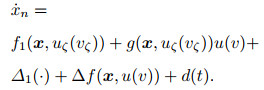
其中: x(t)=[x1(t), x2(t), …, xn(t)]T∈Rn和y(t) ∈R分别为可测的系统状态和系统输出, 所有状态有界, 即满足|xi(t)| < kci, kci(i=1, 2, …, n)为正常数; f(x(t), u(v(t)))∈R为已知的光滑函数, Δf(x(t), u(v(t)))∈R为系统未知且有界的建模误差; d(t)∈R为系统未知的外部干扰; u(v(t))∈R为受执行器饱和特性影响的输出, v(t)∈R为执行器输入, 饱和受限函数u(v(t))可描述为
|
(4) |
sat(·)为标准的饱和函数, Umax为已知的系统输入饱和度.
为了书写方便, 在不引起歧义的情况下, 省略相关变量的自变量, 如f(x(t), u(v(t)))简写为f.
同时, 为保证控制器设计过程阐述清晰, 给出假设条件、定义和引理如下.
假设 1[16] 对于一组给定的状态受限参数kci>0, i=1, 2, …, n, 存在一组正常数Yi(i=0, 1, …, n-1), 使得跟踪期望轨迹yd(t)及其yd(n)(t)有界, 且当∀ t≥0时, |yd(t)|≤ Y0 < kc1, |yd(i-1)(t)| < Yi-1kci, i=2, 3, …, n.
假设 2 f(x, u(v))对x和u(v)的偏导数存在, 且存在一组常数0≤ aimin < aimax和0 < bmin < bmax, 使得在|xi| < kci(i=1, 2, …, n)的条件下, 均有

|
(5) |

|
(6) |
定义 1[27] 若连续函数N(s):R→R满足
|
(7) |
则称N(s)为Nussbaum函数.
引理 1[27] 设V(·)和τ(·)是在[t0, tf)上的光滑函数(其中∀ t∈ [t, tf), V(t)≥0), N(τ)为Nussbaum增益函数, 若
|
(8) |
成立, 则V(·)和τ(·)在[t0, tf)上有界.其中: c、τc和M>0为常数, ι为有界的时变参量.
引理 2[28] 对于∀ρ>0和η∈ R, 均有

|
(9) |
其中κ为满足ζexp(ζ+1)=1的常数, 即ζ=0.278 5.
引理 3[29] 对于∀ kb>0和x∈R, 且满足|x| < kb, 有
|
(11) |
为显性表达u(v)对系统的影响, 在文献[30]的基础上, 将式(2)中的f(x, u(v))在u(v)=uζ(vζ)处进行Taylor展开, 则有
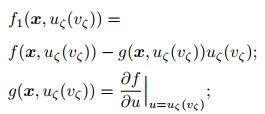
|
Δ1(·)为Taylor展开的高阶项; uζ(vζ)为鲁棒滑模滤波器的状态, 即

|
(12) |
ρ1为滤波器时间常数, ξ1>0和ζ1>0分别为设计的切换增益和调节滑模的切换率,
uζ(vζ)为u(v)的滤波值.
考虑到双曲正切函数对饱和函数(4)的近似作用, 式(4)可等价为
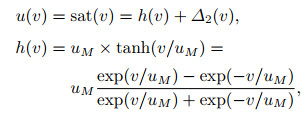
|
(13) |
其中Δ2(v)=sat(v)-h(v)为有界函数, 即满足|Δ2(v)|≤ uM(1-tanh(1)).
在式(11)和(13)的基础上, 式(1) ~ (3)可转换为

|
(14) |

|
(15) |

|
(16) |
其中

|
为由建模误差、外部干扰和近似变换误差组成的系统复合干扰.
控制器设计思路为在考虑复合干扰和输入输出受限的情况下, 构造RPFNNDO估计复合干扰, 并结合障碍Lyapunov和Nussbaum函数设计backstepping控制器, 使得系统(1) ~ (3)的y(t)跟踪yd(t), 控制结构如图 1所示.

|
图 1 基于RPFNNDO的状态/输入受限非仿射非线性系统backstepping控制结构 |
借鉴文献[26]联想层数调整策略, 将可变sine-cosine干扰函数引入到模糊神经网络的隶属函数层, 同时结合具有记忆优势的RNN设计递归层, 构造n维输入单输出且有m条模糊规则的RPFNN结构, 如图 2所示.

|
图 2 递归扰动模糊神经网络结构 |
基于图 2, RPFNN的第i条模糊规则可以表述为
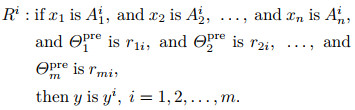
|
其中: xj(j=1, 2, …, n)和y分别为RPFNN的输入变量和输出变量, Θjpre(j=1, 2, …, m)为第j个记忆单元上一时刻的激活强度, rji(j=1, 2, …, m)和yi为模糊单点.
RPFNN的5层具体描述如下.
第1层为输入层, 定义见文献[22]中FNN第1层.
第2层为隶属函数层, 其意义与文献[22]FNN第2层相同.但为了避免因依据经验选取隶属函数带来的适应性不足问题, 基于文献[26]联想层数自组织思路, 本节将在Gauss函数中引入sine-cosine干扰函数.由此, RPFNN的隶属度函数描述为
|
(17) |
|
(18) |
其中cij、bij、hij和ωij分别为第j条规则下, 第i个输入变量对应隶属度函数的中心、宽度、幅值和频率.
第3层为规则层, 其目的是基于匹配模糊规则前件构成模糊规则.定义第k条规则激活度如下:
|
(19) |
第4层为递归层, 其定义见文献[31]中提出的RNN.定义第k个记忆元素的激活函数如下:
|
(20) |
其中rik为第i个和第k个记忆元素之间的权值.
第5层为输出层, 其可描述为
|
(21) |
其中
|
注 1 所提出的递归扰动模糊神经网络具有两个优势: 1)当式(17)中hij=ωij=0(i=1, 2, …,
n, j=1, 2, …, m)时, 其作用与文献[22]所述的隶属函数一致.值得注意的是, 在文献[22]提出的FNN中, 只能靠大量选取隶属函数以保证未知函数估计的准确性, 这必然会带来参数选择具有重叠性以及计算复杂度增加等问题.为此, 本文在Gauss函数中引入sine-cosine扰动函数, 以增强隶属度函数适应性. 2)利用具有便于实现和记忆功能的RNN构造递归层, 使得RPFNN拥有RNN优势.综上, RPFNN兼顾了FNN和RNN优点.
2.2 RPFNNDO设计为利用RPFNN估计式(15)中的复合干扰, 需如下合理的假设.
假设 3 令x∈ Mx, 其中Mx是系统状态的一个紧集, 存在最优输出层权值向量W*、隶属度层中心向量c*、宽度向量b*、幅值向量h*、频率向量ω*和递归层权值向量r*, 使得|∈|≤ ∈*, ∈为RPFNN辨识误差, ∈*为大于零的常数, 并且存在正实数W、c、b、h、ω及r, 满足||W*||≤ W、||c *||≤ c、||b*||≤b、|| h*||≤ h、||ω*||≤ ω和||r*||≤r.
记


|
在假设2和假设3下, 因W*、Θ*、c*、b*、h*、ω*和r*无法直接获得, 式(15)中的复合干扰D可用RPFNN式(17) ~ (21)表示为

|
(22) |
将Θ在c={ 



|
(23) |
其中

|
定理 1 针对不确定仿射非线性系统(14) ~ (16), 在假设2和假设3下, 考虑动态系统

|
(24) |
其中: z为RPFNNDO辅助状态, kd>0为设计常数, Γ(x, 
干扰观测器的干扰估计ud为
|
(25) |
鲁棒项及其参数自适应律为
|
(26) |

|
(27) |
若选取RPFNN参数投影自适应律为
|
(28) |
|
(29) |
|
(30) |
|
(31) |
|
(32) |
|
(33) |
则干扰估计误差




证明 基于式(15)、(24)和(25), 并代入式(22)和(23), 则ed动态过程为
|
(34) |
其中
|
(35) |
因参数自适应律采用了投影算子运算, 故


选取Lyapunov函数为
|
(36) |
基于


|
(37) |
代入式(28) ~ (33), 式(37)可改写为
|
(38) |
若IW=0, 则
|
(39) |
若IW=1, 考虑不等式
|
(40) |
则基于式(28)、(39)和(40)可得
|
(41) |
同理可得

|
由此, 基于引理2, 在式(41)下, 式(38)可简化为
|
(42) |
其中ζ满足ζexp(
基于式(42), 当



注 2 由式(42)可得, 设计参数kd和λd可以调节RPFNNDO的性能.此外, RPFNNDO的输出值式(25)为RPFNN输出和鲁棒项之和.与单纯的RPFNN估计相比, 通过引入鲁棒项可以减少RPFNN固有的未知逼近误差对估计产生的不利影响.
3 控制器设计及闭环系统稳定性分析 3.1 基于backstepping的控制器设计在上述给出的全局时变近似方法和RPFNNDO基础上, 借鉴障碍Lyapunov函数, 利用backstepping方法和Nussbaum函数给出复合控制器结构, 并采用tanh函数构造鲁棒项抑制干扰估计误差对系统的影响.
第1步:当系统(1)中的i=1时, 定义第1个跟踪误差e1=y-yd, 则
|
(43) |
在假设1下, 设计虚拟控制量x2*为
|
(44) |
其中k1>1为设计常数.
为避免backstepping设计中出现的“微分膨胀”问题, 采用的一阶低通滤波器获取x2*的估计值, 即

|
(45) |
其中: 


|
(46) |
其中N1为N1(·)的最大值.
选取Lyapunov函数为
|
沿式(43)和(46)对V1求导, 代入式(44), 并利用Young不等式, 可得
|
(47) |
其中e2=x2-
第i步(2≤ i≤
n-1):定义第i步跟踪误差

|
(48) |
选取虚拟控制量xi+1*为

|
(49) |
其中: ki>1为设计常数; 
类似第1步, 利用一阶低通滤波器对xi+1*进行处理以减少设计的复杂度和计算量, 即

|
(50) |
其中: 

|
(51) |
其中Ni为Ni(·)的最大值.
选取扩充Lyapunov函数为

|
kbi>0为设计参数.沿式(48)和(51)对Vi求导, 并代入式(47)和(49), 可得
|
(52) |
其中ei+1=xi+1-
第n步:依据式(2)可近似为式(15), 定义式(15)的跟踪误差

|
(53) |
设计虚拟控制量xn+1*为
|
(54) |
其中: kn>1为设计常数; ud为经式(25)得到的D的估计值, 且记估计误差




|
(55) |
其中: 

|
(56) |
构造扩充的Lyapunov函数为

|
为设计参数.对Vn求导, 并代入式(52) ~ (54)及引理2可得

|
(57) |
其中
第n+1步:为有效处理式(15)中出现的输入饱和问题, 设计控制律如下:
|
(58) |
|
(59) |

|
(60) |
|
(61) |
其中

|
k0、γχ、kn+1>0为设计常数, N(χ)=χ2cos(χ).
沿着式(59)和(60)对en+1求导, 有
|
(62) |
选择第n+1步的Lyapunov函数为
|
(63) |
其中
|
对式(63)两端求积分, 可得
|
(64) |
其中
|
定理 2 在假设1 ~假设3下, 考虑不确定非仿射非线性系统(1)和(3), 若采用非仿射非线性近似方法(11)和(12), 干扰估计算法(25)和(26), 控制器(44)、(49)、(54)、(58), 且ei(0)∈Ωei={ei:|ei(0)| < kbi, i=1, 2, …, n}时, 则有:
1) 系统跟踪误差ei(i=1, 2, …, n+1)有界, 且满足|ei|≤ Ei, i=1, 2, …, n, |en+1|≤ En+1, 其中
|
2) 系统状态始终满足约束区间;
3) 闭环系统所有信号有界.
证明 1)根据引理1, 式(63)中β有上界, 记其上界为β, 则式(63)可改写为

|
(65) |
由Lyapunov函数构成可得
|
即|ei|≤ Ei成立.同理可得, |en+1|≤ En+1成立.
2) 分x1和xi(i=2, …, n)两部分证明系统所有状态满足约束区间.具体如下:
① 由假设1、y=x1及e1有界可得, |y|=|yd+e1|≤|yd|+|e1| < Y0+kb1=kc1, 即x1始终满足约束区间.
② 因证明xi(i=2, …, n)始终满足约束区间的过程类似, 在此以证明x2始终满足约束区间为例进行阐述.
基于式(44)可知, x2*是关于e1和

当选取适当参数μ2时, 可使∈f1任意小, 记|∈f1|≤∈f1.因此, 有
|
同理可证, xi(i=3, …, n)始终满足约束区间.
3) 基于式(58) ~ (61)可知, v是关于en、en+1、xn+1、xn+1*的连续函数, 由此v有界.此外, 由定理1及上述1)和2)的结论可得, 闭环系统所有信号有界.
注 3 从定理2的证明过程可知, 在假设1下, 控制器参数kbi(i=1, 2, …, n)的选取应满足|ei(0)|≤ kbi, 且满足kb1=kc1-Y0和kbi+xi*+ ∈fi-1≤ kci, i=2, …, n.有关选取kbi(i=2, 3, …, n)的计算过程可参见文献[34].
注 4 由式(44)、(49)、(54)以及(58) ~ (61), 并结合式(63)可知, 当控制参数ki(i=1, 2, …, n+1)取值越大, 系统的收敛速度越快.由式(45)、(50)、(55)和(63)可得, μi(i=2, …, n+1)越小, 动态面误差越小, 且系统收敛速度越快.
注 5 为分析清晰化, 本文仅研究单输入单输出系统.对于一类严格块反馈的不确定非仿射非线性系统, 有类似的结论成立.
4 仿真实验为验证所提方法的有效性, 考虑无人机(unmanned aerial vehicle, UAV)航向运动过程如下[35]:
|
其中: φ为偏航角, r为角速度, θtr为俯仰角, 其同时为UAV航向运动的控制输入; l1=-3.33、l2=-1.38、l3=63.09、l4=11.65、l5=-0.14、Ω=1 200, 具体意义参见文献[35]; d为UAV运动中受到的外部干扰.
令[x1, x2]T=[φ, r]T, u(v)=θtr.设UAV初始条件为x1(0)=-0.2 rad, x2(0)=0 rad / s; 偏航角、角速度和俯仰角受限范围分别为|x1|≤ 1.1 rad, |x2|≤1.8 rad / s, |u(v)|≤ 0.16 rad; 跟踪指令yd=sin t rad.同时, 假设UAV在飞行过程中系统参数存在10 %的摄动, 且外部受到持续扰动d=3sin t+0.1cos t(rad/s2).
利用本文近似方法式(11)和(12)可得系统(66)的仿射形式为
|
其中
|
D是由参数摄动、外部扰动和近似误差构成的UAV系统复合干扰.
选取滤波器(12)的参数ξ1=ζ1=0.01, RPFNN(21)的初始参数

|

|
RPFNNDO(25) ~ (27)的参数为
|
控制器(44)、(49)、(54)和(58)的参数为k1=4, k2=5, k3=5, k0=5, γχ=5, ψ=0.1, δr=2.此外, 根据文献[34]中的方法, 选取kb1=0.4, kb2=1.06.
在上述仿真条件下, 利用基于Taylor级数展开和鲁棒滑模滤波器(12)的近似非仿射非线性系统, 得到仿真曲线如图 3所示.

|
图 3 UAV近似方法与状态真值曲线对比 |
由图 3可知, 本文所提出的近似方法可以实现非仿射非线性系统在线近似为仿射非线性系统, 完成了显现表达控制量u的工作, 为后续基于仿射方法进行控制器设计提供了基础.
为准确在线估计系统复合干扰, 本文提出RPFNN及相应的干扰观测器, 得到复合干扰估计曲线如图 4所示.

|
图 4 UAV复合干扰在线估计曲线 |
由图 4可知, 利用RPFNNDO可以实时估计未知复合干扰, 以此可以实现控制器中对复合干扰进行补偿.
在状态受限以及输入饱和情况下, 依据本文所设计的鲁棒自适应backstepping跟踪控制器, 得到仿真结果如图 5 ~ 图 7所示.

|
图 5 UAV偏航角和角速度跟踪响应曲线 |

|
图 6 UAV偏航角和角速度跟踪误差响应曲线 |

|
图 7 UAV俯仰角响应曲线 |
图 5和图 6说明了系统在状态受限的情况下, 仍然能实现状态跟踪控制.由图 5可知, 本文针对一类在非仿射系统提出的鲁棒自适应backstepping控制方法在存在复合干扰、状态受限以及输入饱和的情况下依然可以保证系统具有良好的跟踪性能, 且满足直升机对偏航角和角速度的约束条件.由图 6可知, 系统状态跟踪误差均收敛于0, 且始终处于预设范围内.由图 7可知, 控制输入饱和受限在[-0.16, 0.16] rad范围内, 实现了俯仰角受限约束.
5 结论本文研究了一类状态/输入受限的不确定严格反馈非仿射非线性系统的跟踪控制问题.设计的基于投影算子的递归模糊神经网络干扰观测器不仅保证了误差变量有界, 且同时能够快速准确地估计系统未知复合干扰.基于给出的近似方法和干扰观测器, 提出了基于障碍型函数和Nussbaum函数相结合的backstepping控制方法, 为解决一类不确定严格反馈非仿射非线性系统的状态/输入受限控制器设计提供新思路.仿真结果验证了本文方法的有效性.
本文所提控制方法也可用于故障系统跟踪控制问题的研究.然而, 针对非仿射系统的近似方法存在要求系统可微的局限, 如何提高近似方法的普遍性是后续的研究重点.
| [1] |
Bidram A, Lewis F L, Davoudi A. Synchronization of nonlinear heterogeneous cooperative systems using input-output feedback linearization[J]. Automatica, 2014, 50(11): 1159-1664. |
| [2] |
Teo J, How J P. Proportional-integral controllers for minimum-phase nonaffine-in-control systems[J]. IEEE Transactions on Automatic Control, 2010, 55(6): 1477-1483. DOI:10.1109/TAC.2010.2045693 |
| [3] |
Yoo S J. Approximation-based decentralized adaptive tracking for a class of arbitrarily switched interconnected non-affine nonlinear systems[J]. Journal of the Franklin Institute, 2017, 354(2): 834-851. DOI:10.1016/j.jfranklin.2016.10.041 |
| [4] |
胡云安, 程春华, 邹强, 等. 非仿射纯反馈系统的间接自适应神经网络控制[J]. 控制理论与应用, 2014, 31(4): 467-478. (Hu Y A, Cheng C H, Zou Q, et al. Indirect adaptive neural networks controller for non-affine pure-feedback systems[J]. Control Theory & Applications, 2014, 31(4): 467-478.) |
| [5] |
Cabrera J B D, Narendra K S. Issues in the application of neural networks for tracking based on inverse control[J]. IEEE Transactions on Automatic Control, 1999, 44(11): 2007-2027. DOI:10.1109/9.802910 |
| [6] |
Bechlioulisa C P, Rovithakisb G A. A low-complexity global approximation-free control scheme with prescribed performance for unknown pure feedback systems[J]. Automatica, 2014, 50(4): 1217-1226. DOI:10.1016/j.automatica.2014.02.020 |
| [7] |
Chen L S, Wang Q. Adaptive robust control for a class of uncertain MIMO non-affine nonlinear systems[J]. Journal of Automatica Sinica, 2016, 3(1): 105-112. DOI:10.1109/JAS.2016.7373768 |
| [8] |
Shi C, Dong X M, Xue J P, et al. Robust adaptive neural control for a class of non-affine nonlinear systems[J]. Neurocomputing, 2017, 223(5): 118-128. |
| [9] |
Garone E, Marco M, Nicotra M M. Explicit reference governor for constrained nonlinear systems[J]. IEEE Transactions on Automatic Control, 2016, 561(5): 1379-1384. |
| [10] |
Bravo J M, Lim & #243;n D, Alamo T, et al. On the computation of invariant sets for constrained nonlinear systems: An interval arithmetic approach[J]. Automatica, 2005, 41(9): 1583-1589. DOI:10.1016/j.automatica.2005.04.015 |
| [11] |
Hatanaka T, Takaba K. Computations of probabilistic output admissible set for uncertain constrained systems[J]. Automatica, 2008, 44(2): 479-487. DOI:10.1016/j.automatica.2007.03.031 |
| [12] |
Herrmann G, Turner M C, Postlethwaite I. A robust override scheme enforcing strict output constraints for a class of strictly proper systems[J]. Automatica, 2008, 44(3): 753-760. DOI:10.1016/j.automatica.2007.06.021 |
| [13] |
Preindl M. Robust control invariant sets and Lyapunov-based MPC for IPM synchronous motor drives[J]. IEEE Transactions on Industrial Electronics, 2016, 63(6): 3925-3933. DOI:10.1109/TIE.2016.2527722 |
| [14] |
Ngo K B, Mahony R, Jiang Z P. Integrator backstepping using barrier functions for systems with multiple state constraints[C]. Proceedings of the 44th IEEE Conference Decision and Control. Seville: IEEE, 2005: 8306-8312.
|
| [15] |
Tee K P, Ge S S, Tay E H. Barrier Lyapunov Functions for the control of output-constrained nonlinear systems[J]. Automatica, 2009, 45(4): 918-927. DOI:10.1016/j.automatica.2008.11.017 |
| [16] |
Tee K P, Ren B, Ge S S. Control of nonlinear systems with time-varying output constraints[J]. Automatica, 2011, 47(11): 2511-2516. DOI:10.1016/j.automatica.2011.08.044 |
| [17] |
Li R, Chen M, Wu Q X. Adaptive neural tracking control for uncertain nonlinear systems with input and output constraints using disturbance observer[J]. Neurocomputing, 2017, 235(4): 27-37. |
| [18] |
Sun L H, Wang W H, Yi R. A novel guidance law using fast terminal sliding mode control with impact angle constraints[J]. ISA Transactions, 2016, 64(2): 12-23. |
| [19] |
Jiang B, Xu D Z, Shi P, et al. Adaptive neural observer-based backstepping fault tolerant control for near space vehicle under control effector damage[J]. IET Control Theory & Applications, 2014, 8(9): 658-666. |
| [20] |
Chen P C, Chen C W, Chiang W L. GA-based modified adaptive fuzzy sliding mode controller for nonlinear systems[J]. Expert Systems with Applications, 2009, 36(3): 5872-5879. |
| [21] |
蒲明, 吴庆宪, 姜长生, 等. 基于模糊干扰观测器的自适应二阶动态滑模控制[J]. 控制理论与应用, 2011, 28(6): 805-812. (Pu M, Wu Q X, Jiang C S, et al. Adaptive second- order dynamic sliding-mode control based on fuzzy disturbance-observer[J]. Control Theory & Applications, 2011, 28(6): 805-812.) |
| [22] |
Lin F J, Hwang W J, Wai R J. A supervisory fuzzy neural network control system for tracking periodic inputs[J]. IEEE Transactions on Fuzzy Systems, 1999, 7(1): 41-52. DOI:10.1109/91.746304 |
| [23] |
Lin C M, Li H Y. Adaptive dynamic sliding-mode fuzzy CMAC for voice coilmotor using asymmetric Gaussian membership funciton[J]. IEEE Transactions on Industrial Electronics, 2014, 61(10): 5662-5671. DOI:10.1109/TIE.2014.2301771 |
| [24] |
Lin C M, Li H Y. Dynamic Petri fuzzy cerebellar model articulation controller design for a magnetic levitation system and a two-axis linear piezoelectric ceramic motor drive system[J]. IEEE Transactions on Control Systems Technology, 2015, 23(2): 693-699. |
| [25] |
Lu H C, Chang M H, Tsai C H. Parameter estimation of fuzzy neural network controller based on a modified differential evolution[J]. Neurocomputing, 2012, 89(7): 178-192. |
| [26] |
张强, 于宏亮, 许德智, 等. 基于自组织小波小脑模型关节控制器的不确定非线性系统鲁棒自适应终端滑模控制[J]. 控制理论与应用, 2016, 33(3): 387-397. (Zhang Q, Yu H L, Xu D Z, et al. A robust adaptive integral terminal sliding mode control for uncertain nonlinear systems using self-organizing wavelet cerebella model articulation controller[J]. Control Theory & Applications, 2016, 33(3): 387-397.) |
| [27] |
Wen C Y, Zhou J, Liu Z T, et al. Robust adaptive control of uncertain nonlinear systems in the presence of input saturation and external disturbance[J]. IEEE Transaction on Automatic Control, 2011, 56(7): 1672-1678. DOI:10.1109/TAC.2011.2122730 |
| [28] |
Polycarpou M M. Stable adaptive neural control scheme for nonlinear systems[J]. IEEE Transactions on Automatic Control, 1996, 41(3): 447-451. DOI:10.1109/9.486648 |
| [29] |
Ren B, Ge S S, Tee K P, et al. Adaptive neural control for output feedback nonlinear systems using barrier Lyapunov function[J]. IEEE Transactions on Neural Networks, 2010, 21(8): 1339-1345. DOI:10.1109/TNN.2010.2047115 |
| [30] |
张强, 袁铸钢, 许德智. 一类输入受限的不确定非仿射非线性系统二阶动态terminal滑模控制[J]. 控制与决策, 2016, 31(9): 1537-1545. (Zhang Q, Yuan Z G, Xu D Z. Second order dynamic terminal sliding mode control for a class of nonaffine non-linear systems with input constraint[J]. Control and Decision, 2016, 31(9): 1537-1545.) |
| [31] |
Kim Y H, Lewis F L, Abdallah C T. A dynamic recurrent neural-network-based adaptive observer for a class of nonlinear systems[J]. Automatica, 1997, 33(8): 1539-1543. DOI:10.1016/S0005-1098(97)00065-4 |
| [32] |
Khalil H K. Nonlinear systems[M]. New Jersey: Prentice Hall, 2002: 168-173.
|
| [33] |
Swaroop D, Hedrick J K, Yip P P, et al. Dynamic surface control for a class of nonlinear systems[J]. IEEE Transactions on Automatic Control, 2000, 45(10): 1893-1899. DOI:10.1109/TAC.2000.880994 |
| [34] |
Tee K P, Ge S S. Control of nonlinear systems with partial state constraints using a barrier Lyapunov function[J]. International Journal of Control, 2011, 84(12): 2008-2023. DOI:10.1080/00207179.2011.631192 |
| [35] |
Xu D Z, Jiang B, Shi P. Global robust tracking control of non-affine nonlinear systems with application to yaw control of UAV helicopter[J]. International Journal of Control Automation and Systems, 2013, 11(5): 957-965. |