 2019, Vol. 34
2019, Vol. 34 ,
, 
2. 东南大学 复杂工程系统 测量与控制教育部重点实验室,南京 210096
2. Key Laboratory of Measurement and Control of Complex Systems of Engineering of Ministry of Education, Southeast University, Nanjing 210096, China
机器人要完成指定任务, 通常都会与对象或者环境发生接触, 因此机器人的力位控制问题对于提高机器人工作能力至关重要.接触性作业已经成为机器人应用的重要领域, 如装配、打磨、抛光、去毛刺等.对于这些任务而言, 单纯的位置控制已不能胜任, 例如机器人擦玻璃时仅采用位置控制, 微小的轨迹规划误差可能导致机器人对接触面脱离接触或是对接触面产生过大的作用力.因此, 机器人对环境接触力的感知和控制是当前机器人技术亟待解决的问题之一, 而其最为关键的问题是对机器人力跟踪技术的研究.
国内外很多学者围绕机器人力控制策略都进行了深入的研究[1], 并对力控制策略进行了总结[2].随着力控技术的发展, 对于环境信息确定或是已知的应用场合, 经典的力控制策略已经得到了非常广泛的应用, 如阻抗控制或混合位置力协调控制等.但是, 对于非结构化环境而言, 接触作业时的环境可能是不同的材料或是未知的材料, 也可能是未知形状的曲面, 或是更为复杂多变的接触环境, 对各种未知特性的环境要想建立完善的模型非常困难, 所以进行力控制的难度也大大增加.
目前, 对于非结构环境下的力跟踪控制的研究方法可归纳如下.
1) 间接调整参考轨迹, 基本思想是辨识环境信息, 进而得到参考轨迹.如, 文献[1]采用递推最小二乘法(Recursive least squares, RLS)对环境参数进行在线估计, 进而选择合适的阻抗参数对机器人控制; 文献[3]采用力反馈与自适应的方法对环境信息进行估计; 文献[4]采用当前与环境的接触信息在线估计环境刚度, 并对稳态误差进行了分析; 文献[5]采用扩展卡尔曼滤波(Extended Kalman filter, EKF)对环境信息进行估计.辨识环境时只能利用过去的信息对未知信息进行估计, 辨识过程往往存在误差, 结果会导致力跟随误差的存在.
2) 直接调整参考轨迹, 基本思想是通过先验信息直接对参考轨迹进行调整.文献[6]根据力误差利用模糊参考自适应控制(Model reference adaptive control, MRAC)思想在线修正参考轨迹; 文献[7]根据力反馈误差, 建立二次误差函数, 利用梯度下降法得到参考位置的修正律, 进而得到预测的参考跟踪轨迹; 文献[8]基于力误差信息通过模糊推理应用比例因子调节参考轨迹; 文献[9]提出预测的思想, 根据力误差采用EKF对参考轨迹进行预测.这种方法往往会存在较大的力跟踪误差, 因为并未考虑机器人与环境接触时的动态物理特性.
3) 调节阻抗参数, 基本思想是根据力反馈信息对阻抗模型参数进行调整, 利用调整后的阻抗模型来实现力跟踪.文献[10]证明了变阻抗控制的稳定性, 并给出了系统稳定时变阻抗的约束条件; 文献[11]通过引入模糊推理技术来调整刚度系数和阻尼系数, 但是并未考虑修改阻抗参数时是否会导致系统失稳, 也并未证明系统的稳定性; 文献[12]应用模糊控制理论, 根据力误差对阻尼参数进行调整; 文献[13]根据力误差实时对刚度参数进行自适应调整.
总之, 方法1)和方法2)采用估计和预测的方法, 所以力跟踪误差是不可避免的, 而且在控制策略中也并未体现接触时的动态物理特性; 而方法3)的控制策略可以有效地控制力跟踪误差, 并且考虑了接触时的物理特性, 但是简单的模糊处理将使得动态跟踪特性变差, 文献中也并未证明变阻抗过程是否能使系统稳定.
针对以上问题, 本文借鉴变阻抗的研究思路, 进一步提出一种自适应变阻抗的力跟踪策略.所提出的自适应变阻抗控制策略不需要对环境信息进行估计和预测, 同时在控制策略中能够反映接触时的动态物理特性.利用自适应控制的优势[14-15], 根据反馈的力误差在线实时自适应调节阻抗参数, 用于补偿动态变化环境的未知性, 并证明了所提出的自适应变阻抗方法能够使系统稳定, 且达到预期的力跟踪效果.
1 机器人与环境的接触力模型机器人与环境的接触过程可以描述为从无负载的自由空间运动到与环境碰撞接触后平稳的约束空间, 其动力学特性在各个阶段表现出不同的情况.机器人与环境的接触过程和接触力变化示意如图 1所示.图 1中, Xe表示环境的位置信息, Xr表示机器人末端的实际位置信息.

|
图 1 机器人与环境接触示意图 |
由图 1(b)可知, 可将机器人与环境接触分为如下3个阶段:
1) 未与环境接触的自由运动线性区Ⅰ.
2) 与环境碰撞的非线性过渡区Ⅱ.由文献[16]中的理论分析和实践证明可知, 机器人与环境交互时, 碰撞是不可避免的, 但是碰撞时间是短暂的, 并具有强烈的非线性.
3) 机器人与环境平稳接触后的近似线性区Ⅲ.
本文将重点分析上述2)和3)阶段的动态接触特性, 机器人被看作是一个刚性系统, 为使机器人对接触环境表现出柔顺性, 机器人可利用力反馈信息采用一定的控制方法实现柔顺.
本文采用基于位置的阻抗模型来实现对期望接触力的动态跟踪控制, 如图 2所示.将机器人和力传感器构成的系统建模为“质量-阻尼-弹簧”的二阶系统, 将环境建模为一阶弹簧系统.

|
图 2 基于位置的阻抗力跟踪系统 |
图 2中, Xr为期望跟踪力对应的参考轨迹信息, Xc为发送给机器人的轨迹信息, Xm为机器人实际到达的轨迹信息, 通常情况在位置控制模式下满足Xc=Xm, 参考轨迹与机器人实际运动轨迹的误差E=Xm-Xr=Xc-Xr; Xe为环境的位置信息, 在建立机器人与环境的接触力模型时, 因为环境被看作是一阶弹簧系统, 所以假设环境的刚度为Ke, 则机器人与环境的接触力可表示为Fe=Ke(Xe-Xm)=Ke(Xe-Xc), Fe可通过力传感器精确获取, Fd为期望的跟踪力, 期望跟踪力与实际接触力的误差ΔF=Fe-Fd.
如图 2所示, 阻抗模型的输入为力误差ΔF, 输出为轨迹误差E, 阻抗模型为二阶传递函数K(s)=1/(Ms2+Bs+K), 即动态的轨迹误差E和力误差ΔF可表示为一个“质量-阻尼-弹簧”的二阶微分系统[5], 如下所示:

|
(1) |
其中M、B和K分别表示质量系数、阻尼系数和刚度系数.
根据力误差可得到发送给机器人的轨迹Xc, 表示为Xc=Xr+E=Xr+ΔF· K(s).
为分析图 2所示的系统反馈模型, 假设机器人在笛卡尔空间的六维信息是解耦的.以一维为例来分析机器人与环境的动态接触力模型, 根据上述假设, 力跟踪误差Δf可以表示为
|
(2) |
将k(s)=1/(ms2+bs+k)代入式(2)可得到
|
(3) |
由式(3)可知, 系统在稳定时的力跟踪误差为

|
(4) |
由式(4)可知, 只有满足下式:
|
(5) |
才能使得力跟踪误差Δfss =0.
由式(5)可知, 只有当环境位置和环境刚度精确获知时得到的精确参考轨迹才能够使力跟踪误差为0, 这种条件下才能得到期望的力跟踪效果.然而, 在非结构环境下, 环境位置和环境刚度均未知, 根据文献[6]中的分析, 即使对环境位置和环境刚度进行补偿, 也很难使得力跟踪误差为0, 达不到期望的力跟踪效果.
针对上述问题, 本文提出一种自适应变阻抗的控制策略来实现在环境信息均未知情况下的力跟踪.
2 基于自适应变阻抗模型的力跟踪策略对于特定的已经环境, 采用经典的阻抗控制[17]通过调节阻抗参数可以使得整个系统稳定且获得较为理想的力跟随效果.但是, 在环境动态变化时, 系统将会失稳, 需要重新调节阻抗参数.本节将解决如下两个非结构环境下的问题, 并提出相应的解决方案.
1) 环境刚度未知或动态变化:提出一种新的阻抗模型使其对于任何环境刚度均适用.
2) 环境位置动态变化:提出一种在线自适应调节阻抗参数的方法来适应动态变化的环境, 从而实现稳定的力跟随效果.
下面分析环境刚度未知或动态变化的情况.式(1)为力误差和轨迹误差的二阶动态微分方程, 将E =Xc -Xr和ΔF=Fe -Fd代入式(1)中可得

|
(6) |
由第1节的分析可知, 因为环境信息未知, 所以很难得到精确的参考轨迹Xr, 因此将Xr用初始的环境位置Xe代替, 进而得到新的阻抗方程[18]如下:

|
(7) |
此时E=Xc-Xe, 为方便分析, 以单方向为例分析力误差与位置误差的阻抗特性, 式(7)变为

|
(8) |
其中e=xc -xe.
当fd =0时, 存在Δfss =0的情况, 此时满足xc =xe, 即机器人与环境刚接触, 接触力为0, 对于任何的环境刚度均成立.
当fd ≠ 0时, xc ≠ xe, 此时Δfss ≠ 0, 为使系统稳定时Δfss =0, 将式(8)中的k修改为k=0, 则式(8)变为

|
(9) |
将fe =ke(xe -xc)=-ke e代入式(9), 得到

|
(10) |
通过分析可知, 即使环境刚度ke未知, 选择合适的m和b也可以使式(10)成立, 因此当系统稳定时存在Δfss =0.
上述推导可得出如下结论:当环境刚度未知或是动态变化时, 通过设定k=0, 可实现预期的力跟踪效果.
下面分析环境位置动态变化的情况.将e=xc -xe代入式(9)可得到

|
(11) |
若环境为平面, 式(11)中


|
(12) |
存在Δfss =0, 即可以实现力跟踪.
若环境为斜坡或是更为复杂的未知曲面时, xe为一个时变的函数, 此时


|
(13) |
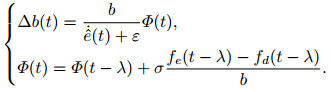
其中fe、fd、


|
(14) |
Δb(t)的表达式为
|
(15) |
ε=10-8, 用于防止式中分母为0; λ为采样率; σ为更新率.
如式(14)和(15)所示, 该式给出了具体的自适应参数的更新方法.为方便实际工业机器人控制器中的实现, 式(14)变为如下所示的离散形式:
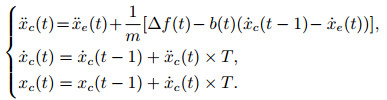
|
(16) |
第2节中的式(14)和(15)给出了自适应变阻抗的形式, 下面将给出自适应变阻抗稳定时的约束条件, 并证明力跟踪的稳态误差为0[18].
将式(15)代入(14)中得到
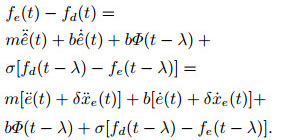
|
(17) |
重新整理式(17), 可以得到
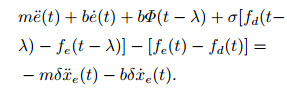
|
(18) |
根据机器人与环境接触时的刚度模型fe =ke (xe -xc)=-ke e, 可以得到
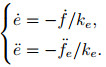
|
(19) |
将式(19)代入(18), 重新整理可以得到
|
(20) |
令
|
(21) |
令c(t)=fd (t)-fe (t), r(t)=fd (t)-
|
(22) |
对于第n个周期的自适应补偿量而言, 满足

|
(23) |
一般情况下, 自适应补偿量的初值为0, 即Φ(t-(n-1)λ)=0.将式(23)代入(22)得到新的方程式

|
(24) |
由拉普拉斯变换的延迟性质可知
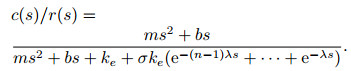
|
(25) |
上述线性系统的特征方程为

|
(26) |
当n趋于无穷大时, 满足
|
(27) |
当采样率足够小时, 由泰勒展开式可知e-λs≈ 1-λs, 则式(26)可重新整理为

|
(28) |
根据劳斯判据构造的劳斯表如下所示:
|
(29) |
为保证系统渐近稳定, 由特征方程系数组成的劳斯表的第一列的元素和特征方程的全部系数均为正数, 如下所示:
|
(30) |
从而得到稳定时的约束条件为
|
(31) |
对于稳定的系统, 根据拉普拉斯变换的稳态误差的定义, 系统的稳态误差ess为
|
(32) |
为检验系统的稳态误差, 在输入端输入阶跃信号, 即r(s)=(1/s), 式(32)变为

|
(33) |
由式(33)可得
|
(34) |
|
(35) |
由式(35)可知, 当t→∞时, fe→ fd, 说明可以实现对期望力的跟踪.
4 实验结果 4.1 数值仿真下面通过3个不同的实验对经典的定阻抗和本文所提的自适应变阻抗在多种非结构环境下进行力跟踪算法的测试和对比.经典的定阻抗公式采用式(11), 自适应变阻抗公式采用式(14)和(15).在对算法进行对比验证时, 本文先采用Matlab Simulink仿真的方式对算法进行对比, 在实际控制器系统中, 控制器与机器人的通讯周期为5 ms, 因此在仿真时也将单位运行周期设定为5 ms.为保证仿真与实际控制最大可能的相近性, 一方面将仿真代码采用与控制器中一致的代码规范进行编写, 另一方面尽可能在仿真环境中模拟出接触时的物理特性.如下仿真测试以单方向为例进行测试和对比, 坐标系系统如图 1(a)所示.
1) 假设接触环境为平面, 则满足
|
(36) |
测试结果如图 3所示, 图 3(a)为轨迹跟踪效果, 图 3(b)为力跟踪效果.

|
图 3 接触环境为平面时的跟踪效果 |
经测试, 选取阻尼系数b=65可以取得较为理想的效果.在图(3)中, xe表示环境的位置信息; xc表示发送给机器人的位置信息; fd表示期望的跟踪力; fe表示机器人与环境的实际接触力, 通过六维力传感器反馈得到.由图(3)可知, 在0 ~ 0.4 s区间内, 机器人由自由空间向约束空间运动.在与环境接触后, 由图 3(a)可知, 在力调整过程中轨迹无震荡, 并且跟踪到期望力对应的期望轨迹; 由图 3(b)可知, 当环境刚度变化时, 经短暂的力调整后均能够跟踪到期望的力.
上述实验结果说明, 式(11)对于变化的环境刚度具有鲁棒性, 所以经典的定阻抗对于接触环境为平面、环境刚度随时变化的情况可以取得较好的力跟踪效果.
2) 假设接触环境为斜面, 此时b=60,

|
图 4 斜面环境下定阻抗控制对应的跟踪效果 |

|
图 5 斜面环境下自适应变阻抗对应的跟踪效果 |
对于定阻抗而言, 经测试, 选取阻尼系数b=50可以使得力跟踪达到稳定.但是, 由图 4(b)可知, 稳定值为
3) 假设接触环境为正弦曲面, 此时

|
图 6 正弦曲面下定阻抗控制对应的跟踪效果 |

|
图 7 正弦曲面下自适应变阻抗对应的跟踪效果 |
由图 6可知, 对于定阻抗而言, 即使选择不同的b, 力跟踪误差一直存在, 而且是完全跟踪不到期望力.对于自适应变阻抗而言, 经测试, 选取初始阻尼系数b=65可以取得理想的跟踪效果.由图 7(b)可知, 自适应变阻抗经过前期的自适应调整后, 能够达到预期的力跟踪效果.
由上面的3个实验可得出如下结论:对于平面而言, 即使环境刚度不确定, 定阻抗能够达到预期的力跟踪效果, 但是对于斜面或是更为复杂的未知曲面而言, 定阻抗基本不可能实现预期的力跟踪效果, 而自适应变阻抗经过前期的短暂调整后, 可以达到预期的力跟踪效果.
4.2 物理实验本文基于课题组自主研发的机器人控制器、埃斯顿Pronet系列伺服驱动器和埃斯顿ER16机器人本体搭建系统平台, 在机器人末端安装有六维力传感器Optoforce HEX-70和力跟踪设备, 系统示意图如图 8所示.控制器与埃斯顿驱动器之间的通讯方式是EtherCAT, 控制器与六维力传感器之间的通讯方式是UDP, 通讯周期均为5 ms.

|
图 8 力跟踪系统 |
下面通过3个实验验证所提算法的可行性.
1) 恒力定点跟踪.首先以机器人戳气球为例, 测试恒力定点跟踪效果, 测试场景如图 9所示.测试过程共包括4次恒力跟踪, 恒力分别为-3.5 N、-6 N、-7 N和-9.5 N.

|
图 9 定点恒力跟踪测试场景 |
实验过程中, 将阻抗系数设定如下: m=1, k=0, 参数b是自适应更新, 初始的b=40, 更新率σ=0.01.结合图 9可知, 机器人末端经历了4次“下降→力跟踪→回原点”的动作序列.由图 10可知, 机器人均能达到预期的恒力跟踪效果.经过对数据分析可知, 定点力跟踪误差在0.5 N之内.

|
图 10 定点恒力跟踪测试结果 |
2) 平面恒力跟踪.在机器人末端安装力跟踪装置, 本实验测试对水平桌面的恒力跟踪, 桌面为木板材质, 设定预跟踪力为-12 N, 阻抗系数和更新率设定同上.测试场景如图 11所示, 测试结果如图 12和图 13所示.

|
图 11 平面恒力跟踪测试场景 |

|
图 12 平面恒力跟踪测试结果 |

|
图 13 平面恒力跟踪下的位置信息 |
由图 11可知, 机器人末端沿着水平桌面运动, 实现在平面条件下的恒力跟踪测试.结合图 12和图 13可知, 在机器人末端刚刚与桌面接触时会出现瞬间的碰撞, 符合图 1所示的接触特性, 后又快速稳定在期望力附近.机器人末端与平面接触过程中不可避免有摩擦力的存在, 因此跟踪过程中力跟踪效果不如定点跟踪效果, 但是跟踪的力误差在预设的期望误差之内.通过对图 13与实际环境的位置对比可知, 机器人通过恒力跟踪, 跟踪到了平面的位置信息.
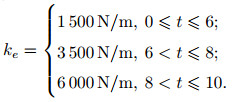
3) 曲面恒力跟踪.曲面恒力跟踪的测试环境是一段曲面和一段平面, 为了测试所提算法的鲁棒性, 曲面和平面采用不同刚度的材质, 曲面采用刚块, 平面采用塑料平板, 在钢块与塑料平板的交接处设计有一个孔洞.阻抗系数和更新率设定同上.测试环境如图 14所示, 测试结果如图 15和图 16所示.

|
图 14 曲面恒力跟踪测试场景 |

|
图 15 曲面恒力跟踪测试结果 |

|
图 16 曲面恒力跟踪下的位置信息 |
由图 14可知, 当机器人末端与钢块接触时, 会出现微小的震荡, 之后机器人末端沿着曲面和平面运动.曲面和平面采用不同的材质, 用于测试所提自适应算法的鲁棒性.由图 15可知, 机器人末端在通过材质为刚块的曲面时, 力误差在预设的期望范围内.当通过孔洞时, 此时相当于位置有突变, 机器人经过短暂的调整后, 跟踪到了材质为塑料板的平面.图 16为
5 结论本文基于经典的定阻抗框架提出了一种适用于非结构环境下力跟踪的控制方法, 该方法基于自适应变阻抗模型.对机器人与环境接触时的动态物理特性建模, 分析了影响力跟踪效果的两个关键影响因素:环境刚度和环境位置.针对环境刚度的不确定性, 对经典的阻抗模型进行变形, 并提出了一种新的阻抗模型, 使之能够适应任何环境刚度; 针对环境位置信息的动态变化情况, 提出了一种基于力反馈的在线调整阻抗参数的控制策略, 使之能够补偿环境动态变化的未知性.最后对经典的定阻抗和本文所提的自适应变阻抗进行了多种非结构环境下仿真和物理实验条件下的力跟踪性能对比, 所提的控制算法易于在实际工业控制器中实现, 并且能够取得预期的力跟踪效果.该力控策略为接触型作业提供了更为有效的解决方案, 对力跟踪任务的推广具有一定的意义.
| [1] |
李二超.未确知环境下机器人力控制技术研究[D].兰州: 兰州理工大学电气与信息工程学院, 2011: 24-27. (Li E C. Study of the robotic force control based on uncertain environment[D]. Lanzhou: College of Electrical and Information Engineering, Lanzhou University of Technology, 2011: 24-27.)) http://cdmd.cnki.com.cn/Article/CDMD-10731-1012515329.htm |
| [2] |
Calanca A, Muradore R, Fiorini P. A review of algorithms for compliant control of stiff and fixed-compliance robots[J]. IEEE/ASME Trans on Mechatronics, 2016, 21(2): 613-624. DOI:10.1109/TMECH.2015.2465849 |
| [3] |
Zhang X, Khamesee M B. Adaptive force tracking control of a magnetically navigated microrobot in uncertain environments[J]. IEEE/ASME Trans on Mechatronics, 2017, 22(4): 1644-1651. DOI:10.1109/TMECH.2017.2705523 |
| [4] |
Komati B, Clevy C, Lutz P. Force tracking impedance control with unknown environment at the microscale[C]. IEEE Int Conf on Robotics and Automation. Hong Kong: IEEE, 2014: 5203-5208. http://ieeexplore.ieee.org/xpls/abs_all.jsp?arnumber=6907623
|
| [5] |
Roveda L, Iannacci N, Vicentini F, et al. Optimal impedance force-tracking control design with impact formulation for interaction tasks[J]. IEEE Robotics & Automation Letters, 2017, 1(1): 130-136. |
| [6] |
Seraji H, Colbaugh R. Force tracking in impedance control[J]. Int J of Robotics Research, 1993, 16(1): 97-117. |
| [7] |
汪双, 刘满禄, 张华. 机械臂力跟踪阻抗和避碰控制仿真研究[J]. 自动化与仪表, 2017, 32(5): 44-49. (Wang S, Liu M L, Zhang H. Simulating study on force tracking and collision avoidance control of robot manipulators[J]. Automation & Instrumentation, 2017, 32(5): 44-49.) |
| [8] |
李二超, 李战明. 基于力/力矩信息的面向位控机器人的阻抗控制[J]. 控制与决策, 2016, 31(5): 957-960. (Li E C, Li Z M. Impedance control for positional- controlled robotic manipulators based on force/torque information[J]. Control and Decision, 2016, 31(5): 957-960.) |
| [9] |
朱国昕, 程浩. 基于预测控制的微创血管手术导管机器人系统力跟踪[J]. 伺服控制, 2015(Z1): 50-52. (Zhu G X, Cheng H. Force tracking control for minimally invasive vascular surgery robot system based on predictive control[J]. Servo Control, 2015(Z1): 50-52.) |
| [10] |
Kronander K, Billard A. Stability considerations for variable impedance control[J]. IEEE Trans on Robotics, 2016, 32(5): 1298-1305. DOI:10.1109/TRO.2016.2593492 |
| [11] |
李二超, 李战明, 李炜. 基于神经网络视觉伺服的机器人模糊自适应阻抗控制[J]. 电工技术学报, 2011, 26(4): 40-43. (Li E C, Li Z M, Li W. Robotic fuzzy adaptive impedance control based on neural network visual servoing[J]. Trans of China Electrotechnical Society, 2011, 26(4): 40-43.) |
| [12] |
刘智光, 于菲, 张靓, 等. 基于模糊自适应阻抗控制的机器人接触力跟踪[J]. 工程设计学报, 2015(6): 569-574. (Liu Z G, Yu F, Zhang L, et al. Force tracking research for robot based on fuzzy adaptive impedance control algorithm[J]. Chinese J of Engineering Design, 2015(6): 569-574. DOI:10.3785/j.issn.1006-754X.2015.06.009) |
| [13] |
Pei Y, Obinata G, Kim Y W, et al. Adaptive impedance control with variable viscosity for motion and force tracking system[C]. Int Symposium on Micro-Nanomechatronics and Human Science. Nagoya: IEEE, 2015: 1-5.
|
| [14] |
Calanca A, Fiorini P. Understanding environment- adaptive force control of series elastic actuators[J]. IEEE/ASME Trans on Mechatronics, 2018, 23(1): 413-423. DOI:10.1109/TMECH.2018.2790350 |
| [15] |
Kaya K D, Çetin L. Adaptive state feedback controller design for a rotary series elastic actuator[J]. Trans of the Institute of Measurement & Control, 2017, 39(1): 61-74. |
| [16] |
陈俊杰, 黄惟一, 宋爱国. 机器人与环境接触的动力学特性[J]. 控制与决策, 2002, 17(1): 57-60. (Chen J J, Huang W Y, Song A G. Dynamic character of robot getting in touch with environment[J]. Control and Decision, 2002, 17(1): 57-60. DOI:10.3321/j.issn:1001-0920.2002.01.014) |
| [17] |
Hongan N. Impedance control an approach to manipulation: Part Ⅰ-Theory, Part Ⅱ-Implementation, Part Ⅲ-Applications[J]. J of Dynamic Systems Measurement & Control, 1985, 107(1): 1-24. |
| [18] |
Jung S, Hsia T C, Bonitz R G. Force tracking impedance control of robot manipulators under unknown environment[J]. IEEE Trans on Control Systems Technology, 2004, 12(3): 474-483. DOI:10.1109/TCST.2004.824320 |