
主管单位:中华人民共和国教育部
主办单位:东北大学
国内刊号:21-1124/TP
国际刊号:1001-0920
创刊时间:1986年
出版周期:月刊

控制与决策期刊

中国控制与决策会议










2025,40(1):1-6, DOI: 10.13195/j.kzyjc.2024.1318
摘要:
2025,40(1):7-27, DOI: 10.13195/j.kzyjc.2024.0283
摘要:水下无人系统跨域协同控制,旨在通过传感器融合、跨域通信、数据处理等技术和方法,突破水下单一传输介质限制,实现水下物理单元跨域信息交互和任务协同.它是未来海上无人系统发展的趋势,对提升海上无人系统智能化与自主化至关重要.目前,水下无人系统跨域协同控制理论研究尚不成熟,在任务部署、信息交互、路径规划与多机控制等层面面临诸多亟待解决的难题.鉴于此,详细阐述了海空跨域协同下的水下无人系统架构与主要特征,分析了水下无人系统跨域协同控制面临的挑战与关键问题;梳理总结了水下无人系统跨域协同国内外发展现状;综述了水下任务部署、信息交互、导航制导与协同控制层面的研究进展.最后,对水下无人系统跨域协同控制未来值得深入探究的方向,进行了总结与展望.
2025,40(1):28-37, DOI: 10.13195/j.kzyjc.2024.0346
摘要:自主水下航行器(AUV)在任务进行过程中或完成后需通过自主回收实现能源补充与数据下载等操作,是否能进行高效、精准地回收引导决定了AUV的回收效率,成为其能否广泛应用的关键.针对AUV坐落式回收过程中的近距离光学引导定位问题,提出一种基于深度学习的单双目位姿测量算法.首先,面向恶劣的水下光学成像条件,结合暗通道先验去雾和YOLO v9目标检测网络,实现一种可适应不同水质、光照强度且鲁棒性强、可靠性高的引导光源提取算法.同时,针对回收过程中的特征匹配问题,设计一种不依赖于AUV速度的全向特征匹配算法,实现3D-2D特征匹配.此外,针对坐落式回收典型的多阶段引导特点,分别基于PnP原理和SVD分解设计面向不同阶段的单、双目引导定位算法.最后,基于多次仿真和实物实验,验证算法在精确位姿估计方面的可行性和有效性.
鲜江峰,马俊领,吴华锋,梅骁峻,谭拂晓,张媛媛,陈信强,王维军
2025,40(1):38-47, DOI: 10.13195/j.kzyjc.2024.0521
摘要:水声传感网(underwater acoustic sensor networks,UASNs)是水下物联网的主要技术,为海洋生态环境监测和水下搜救等应用提供了较好的技术手段和信息感知平台.在UASNs应用中定位至关重要,因为没有精确位置信息的数据收集将无利用价值.然而,由于存在路径损耗、吸收损耗、设备发射功率不确定以及水下环境参数未知等不利因素,使得在复杂动态海洋环境中实现鲁棒精确定位较为困难.为此,提出一种多参数未知下水声传感网由粗到精的定位方法(coarse-to-fine localization method for UASNs under unknown multi-parameters,CFL-UMP).首先,利用一阶泰勒级数展开和若干近似操作,将原非线性非凸定位问题转化为交替非负约束最小二乘框架;然后,粗定位阶段基于Golub-Kahan双对角化的最小二乘残差(LSMR)算法求解得到位置估计近似解,然而LSMR通常只能快速收敛到局部最优解,因此在精细定位阶段引入二分法,将第1步粗估计得到的近似解作为二分法的初始值,通过迭代同时得到水下目标位置、路径损耗因子以及发射功率的精确解;接着,为了验证CFL-UMP算法的优越性,分析CFL-UMP算法的计算复杂度,并推导出克拉默-拉奥下界;最后,与所选基准算法相比,通过仿真结果证实了CFL-UMP在不同水下模拟场景中均能获得最优的定位精度,且能够有效降低水下定位误差.
2025,40(1):48-54, DOI: 10.13195/j.kzyjc.2023.1593
摘要:复杂的水下环境通常会引起信号传播延迟或带来量测野值,从而产生量测丢失和非高斯噪声问题,导致水下自主定位的精度降低.为了解决这些问题,提出一种基于贝叶斯推断和统计相似度量测的水下自主定位方法.首先,该定位方法使用最大后验估计方法来判断量测丢失是否发生.如果接收到此刻的量测信息,则采用不动点迭代方法最大化统计相似度量测的下界,以逼近真实的噪声协方差矩阵,从而获得更准确的状态估计和误差协方差矩阵;如果没有接收到量测信息,则只输出一步预测的状态估计和误差协方差矩阵,以提高该方法的鲁棒性.仿真和海试实验验证结果表明,所提出的水下自主定位方法相较于其他的定位方法具有更高的定位精度和更好的鲁棒性.
2025,40(1):55-63, DOI: 10.13195/j.kzyjc.2024.0262
摘要:高性能水声路由协议要求协议具有高吞吐量的同时,能耗尽可能小,这是提高能源利用效率的关键.针对这一问题,提出基于能量优化和超时传输的水声传感器网络路由协议.首先,路由寻找阶段融合能量均衡策略并利用退避机制尽可能接收多的路由请求再进行回复来控制路由开销;然后,数据传输阶段引入超时传输机制,利用主备份路由协同传输并监听和判断链路有效性,融合碰撞避免机制规避碰撞;最后,通过仿真和水下实验与按需平面距离向量路由协议(Ad Hoc on-demand distance vector routing, AODV)和矢量转发路由协议(vector based forwarding, VBF)进行对比.仿真实验结果表明:所提出协议相比于AODV与VBF,吞吐量和数据包成功接收率均有提升,且具有更低的单位字节能耗;水下实验结果表明:相比于AODV,所提出协议吞吐量提升了11.84%,数据包成功接收率提升了15.62%,单位字节能耗可降低0.10J.
2025,40(1):64-70, DOI: 10.13195/j.kzyjc.2023.1701
摘要:海洋环境复杂多变,船舶航行容易受到风浪、洋流等因素的干扰,船舶运动具有非线性、耦合性等特点.针对传统的船舶运动姿态预测方法对时序数据的提取效率尚有不足,难以达到高精度预测效果的问题,提出样本卷积交互-通道注意力(SCI-CA)神经网络船舶纵摇运动预测模型.该模型采用多类别船舶运动姿态数据作为输入,将输入拆分为两个子序列,利用样本卷积交互网络(SCI)的递归下采样卷积交互结构,结合多分辨率聚合而成的丰富特征,提高船舶运动数据深层特征的利用率.再通过通道注意力机制(CA)提高有效通道的权重比例,并以残差结构输入到全连接层,得到最后的预测结果.实船数据验证结果表明,SCI-CA组合模型预测结果较其他模型预测精度高,其平均绝对百分比误差(MAPE)、均方根误差(RMSE)均有明显降低,验证了SCI-CA模型预测船舶运动的有效性.
2025,40(1):71-79, DOI: 10.13195/j.kzyjc.2024.0306
摘要:针对随机通信时延和时变通信拓扑条件下的多水下自主航行器编队轨迹规划问题,将随机梯度上升算法引入分布式模型预测控制方法中,提出一种在线分布式轨迹规划方法.首先,通过采样贝塞尔曲线,将轨迹规划问题转化为一系列优化问题.然后,通过拉格朗日对偶函数法分布式求解,在完成点对点轨迹规划任务的同时保持成员间通信连接.最后,基于拉格朗日对偶理论框架推导出所提出算法的收敛速度与最大通信时延的定量关系,通过在仿真场景下与现有方法的对比实验验证所提方法的可行性和有效性,并通过仿真实验探究水下自主航行器自身运动误差及定位误差对轨迹规划的影响.
2025,40(1):80-86, DOI: 10.13195/j.kzyjc.2023.1617
摘要:为解决三维空间中的水下无线传感器网络(underwater wireless sensor networks, UWSN)传统DV-Hop算法定位误差大的问题,提出一种基于改进瞪羚优化算法(improved gazelle optimization algorithm, IGOA)的UWSN三维定位算法(IGOADV-Hop).首先,通过双通信半径修正节点跳数,对锚节点间的距离误差进行加权修正;然后,在瞪羚优化算法引入Logistic映射初始化种群,增加种群多样性;接着,在开发阶段引入位置更新动态权重系数,提升节点位置计算的全局寻优能力;最后,使用IGOA替代最小二乘法进行节点三维坐标计算,并在网络中加入移动节点和水下噪声构建动态UWSN.仿真实验结果表明,与传统DV-Hop算法和其他群智能优化算法相比,所提出算法定位精度更高.
2025,40(1):87-94, DOI: 10.13195/j.kzyjc.2024.0016
摘要:随着海上风力发电和光伏发电的快速发展,海洋输电工程的地位越来越重要,海底电缆的应用也越来越广泛.获得精确的海底电缆位置不仅有利于日常巡检,而且提高了故障检测的效率,因此,海底电缆的路由定位和故障检测将会是未来维护和维修的重要环节.由于海底电缆的小直径和内部电流的变化性,导致定位准确度的下降以及定位难度的上升.针对上述问题,首先,基于海底环境和水下机器人,利用三芯铠装海底电缆的电缆结构推导海底电缆外磁场的近似方程;然后,水下机器人根据检测到的磁感应强度值进行姿态调整,在此基础上,提出一种基于改进灰狼优化算法(improved grey wolf optimization, IGWO)的海底电缆定位算法,利用基于磁通密度模的适应度函数,设计一种用于海底电缆探测的在线路径定位方法;最后,通过仿真实验验证了IGWO算法实现海底电缆定位的精确性和有效性.
2025,40(1):95-102, DOI: 10.13195/j.kzyjc.2024.0338
摘要:为解决水下非结构化环境给水下精准定位带来的问题,提出一种基于LSTM的惯性里程计定位方法用于水下作业机器人的定位.该网络在训练阶段,首先通过模拟噪声模型,在IMU的加速度和角速度数据中增添高斯白噪声实现数据增强,使用ResNet18提取机器人运动特征;然后在网络的输入空间引入IMU的采样时间加强鲁棒性,并使用三通道LSTM将提取的特征映射到高维空间进行特征融合;最后使用全连接层预测机器人的相对位移和旋转.在训练过程中,采取相对损失函数和绝对损失函数相结合的方式确保网络在短期和长期的定位精度,并进行多次数据集和水池实验以验证方法的有效性.实验结果表明,该方法在大多数场景下都具有较好的定位性能,有着较强的鲁棒性.
2025,40(1):103-110, DOI: 10.13195/j.kzyjc.2024.0519
摘要:考虑到水下目标定位过程存在通信和采样中的不确定性,叠加含噪定位网络解算引入的额外误差,如何求解长航时水下目标定位误差方差下界用于评估定位性能至关重要.针对水下目标机动运行定位精度不稳定的问题,采用无迹粒子滤波和拓展后验克拉美罗估计,开展水下目标长航时近似最优精度建模和评估.首先,考虑水下多参量非线性模型易引起滤波退化,采用无迹粒子滤波对水下目标状态进行估计;然后,利用泰勒级数展开求解水下目标预测状态的近似逼近;接着,将滤波估计得到的状态值与近似估计得到的期望和方差,集成到水下目标三维拓展后验克拉美罗估计中;最后,开展无迹卡尔曼滤波0阶sim2阶、粒子滤波、最大最小粒子滤波、无迹粒子滤波0阶sim2阶与理论最优估计值的比较,所提出模型长航时目标位置和速度近似后验克拉美罗估计值能够逼近理论值,可用于水下目标长航时定位性能分析.
2025,40(1):111-118, DOI: 10.13195/j.kzyjc.2024.0513
摘要:针对水声双扩展信道背景下的连续波信号跟踪问题,提出一种基于粒子滤波的检测前跟踪算法,重点提升临近多径信号干扰下的弱信号跟踪性能.首先,提出一种利用临近信号预测状态来描述多径信号干扰的似然函数;其次,在量测空间中引入速度量测集,推导速度-相关包络联合似然函数解析式,并以此构建多量测输入的信号检测前跟踪模型,最终获得稳健的信号参数跟踪结果.数值仿真与水池实验结果表明,在典型的水声时变双扩展信道下,所提出算法具有更优的多径信号检测及跟踪性能.
2025,40(1):119-127, DOI: 10.13195/j.kzyjc.2024.0520
摘要:随着自主水下机器人(AUV)和无人水面艇(USV)在民用和军事领域的应用不断扩展,USV与AUV协同完成相关任务的作业模式受到了广泛关注. 针对多USV和多AUV协同访问多目标点的任务分配问题进行研究,旨在最小化多USV和AUV系统访问所有目标点的总旅行距离.首先,建立考虑通信约束和AUV最大航程约束的多USV多AUV协同多点访问任务分配问题的数学模型,并对问题的NP-hard属性进行分析.其次,提出一个两阶段任务分配算法:1)先利用最小边际代价算法构建各USV访问完所有水面目标点的路径,再采用最近插入策略分配水下目标点;2)通过多个邻域搜索算子对初始解进行优化,得到可行最终解.相对于已有流行的自组织映射算法,仿真实验表明所提出任务分配算法能在较短计算时间内得到质量较优的任务分配方案.
2025,40(1):128-136, DOI: 10.13195/j.kzyjc.2024.0522
摘要:基于深度学习的水下声学目标识别算法在水下平台部署时,通常面临计算资源短缺和水下声学环境复杂多变的挑战,提出一种结合二值化神经网络与知识蒸馏的轻量型水声目标识别算法(DSBNN_KD),旨在通过深度可分离卷积和权重参数二值化等手段实现模型的压缩和优化加速.同时,利用知识蒸馏技术将高性能高复杂度的教师模型的知识转移到轻量级学生模型上,从而缓解极端量化带来的性能损失,并确保模型的泛化性能.对DSBNN_KD的表现在两个实测水声数据集上进行全面评估,实验结果表明,相比当前主流的全精度轻量化模型,所提出DSBNN_KD在模型参数量、模型部署尺寸和计算量等方面均展现出显著的优势,同时在知识蒸馏技术的辅助下,量化后的模型依然可以保持与全精度模型接近的性能.
2025,40(1):137-147, DOI: 10.13195/j.kzyjc.2024.0526
摘要:利用多智能体强化学习方法赋能异构多实体系统是分布式人工智能领域的前沿课题.多机协同突防海上目标任务中异构多编队之间的高效协同是制胜的关键,由于环境的部分可观导致多智能体强化学习方法的探索效率不高.为此,提出一种知识耦合分层值分解(hierarchical value decompostion,HAVED)的多机协同突防行动策略规划方法,上层围绕多机编队间(intra-team)占位规划展开资源调度,下层围绕编队内(inner-team)任务规划展开目标分配.对值分解基类算法利用加权算子对联合动作对应的损失进行加权,避免陷入局部最优,着力提升多机多编队在对抗场景中突防策略的探索与学习效率.为验证算法的有效性,以多机协同突防海上目标为典型任务场景,设计典型任务想定.采用集中式训练-分布式执行范式,在墨子兵棋推演平台上进行仿真实验,对多类值分解方法进行对比分析,以验证所提出方法的有效性.最后通过对推演对抗过程数据进行复盘分析,总结出智能体涌现出的3种典型行动策略.
2025,40(1):148-154, DOI: 10.13195/j.kzyjc.2023.1745
摘要:船联网(internet of vehicle,IoS)是船舶信息交换的载体.基于区块链技术,在IoS上构建一种可信的信息交换机制,并提出相应的航行事件置信度计算与船舶信誉管理方案.该方案借鉴信息过滤的思想得到船舶综合相似度,利用加权熵值反向计算融合的评级,根据回应船舶评级偏离融合评级的程度更新回应船舶的信誉值;然后采用最小二乘法建立信誉值倒数与评级误差之间的拟合关系,从而得以更新报告船舶的信誉值;进一步设计基于船舶信誉值的DPoS(delegated proof of stake)共识机制,旨在优先选择信誉值较高的船舶作为见证者船舶,以保障系统出块环境的稳定性和高效性.结果显示,在船舶滥用行为占比为40%的情况下,航行事件真实性判定的准确率仍在75%以上.研究表明,所提出的方案不仅有效提高了航行事件真实性判定的准确率,还能识别恶意船舶并限制其滥用行为,从而保证IoS环境的安全和稳定.
2025,40(1):155-161, DOI: 10.13195/j.kzyjc.2024.0013
摘要:针对水下小型UUV难以检测识别问题,提出基于自适应特征模式分解与联合卷积网络的UUV辐射噪声识别方法.首先,采用自适应特征模式分解(AFMD)对信号进行处理,获取一系列分解分量,根据基尼指数(GiNi index)选取最优分量进行重构;然后,对重构后的信号进行连续小波变换,获取不同类型辐射噪声的二维时频图;最后,在频率动态卷积模块和SGE(spatial group-wise enhance)模块基础上,引入特征融合模块构建联合卷积神经网络(JCNN),利用所设计网络提取二维时频图特征,实现水下无人潜水器辐射噪声分类.实验结果表明,所提出方法能够对水下UUV辐射噪声进行识别,且识别率较高.
2025,40(1):162-169, DOI: 10.13195/j.kzyjc.2024.0094
摘要:针对水下图像出现蓝绿色偏、雾化和噪声等问题,提出一种基于颜色线模型和多尺度融合的水下图像增强算法.首先,设计一种局部自适应颜色校正方法对退化图像进行预处理,提高图像颜色线拟合效果并降低图像色偏的程度;然后,构建一种利用颜色线和背景光矢量求解偏置来估计透射率的凸优化算法,求得准确的模型参数来恢复图像实现图像去雾;接着,将预处理后的图像利用白平衡算法来补偿颜色的深度选择性吸收所造成的偏色,将白平衡处理后的图像分别利用伽玛校正和基于颜色线约束的噪声抑制算法进行处理,分别得到提高全局对比度和抑制噪声的图像;最后,对去雾、对比度增强和低噪声图像进行多尺度融合,得到特征丰富的水下增强图像.实验结果表明:所提出方法能够有效解决水下图像的色偏、雾化和噪声现象;相对于各对比算法,在水下彩色图像质量评价指标和峰值信噪比上分别提高了18.37%和42.16%,更好地保留了水下图像的颜色并降低了图像噪声.
2025,40(1):170-179, DOI: 10.13195/j.kzyjc.2024.0324
摘要:水下潜器凭借其强机动性和自主性,已成为海事搜索救援中的必要设备.现有研究普遍通过随机部署潜器的方式来实现给定水域目标探测,并没有从理论上对探测航迹和队形进行建模分析.鉴于此,首先,证明随机选择起点和移动方向的潜器,直线航迹是实现最大覆盖和最大目标探测概率的最优航迹;然后,基于上述探测航迹,采用测度理论建立面向水下搜索救援的潜器探测模型;接着,考虑潜器通信损耗,证明潜器感知区域在相切时是最优的探测队形,并严格分析潜器编队夹角、间距、移动速度和采样周期对目标探测概率的影响;最后,通过仿真结果验证所构建模型和所提出方法可有效地提高目标的探测概率.
2025,40(1):180-186, DOI: 10.13195/j.kzyjc.2024.0528
摘要:海面物联网在海洋观测、海域监测等应用中发挥着重要作用.复杂动态海洋环境造成海洋网络链路状态、链路质量的时变特征,且其给海面物联网带来了严峻挑战,为此,将物理层自适应数据速率、媒体访问控制(MAC)层载波侦听多址接入与网络层机会路由联合进行跨层设计,提出速率自适应海面物联网跨层传输协议,通过3次握手机制机会性选择最佳转发结点并基于动态信噪比实现传输速率实时自适应调整,旨在提高动态复杂海洋环境下海面物联网的稳健性.陆地和湖上试验结果表明,所提协议在数据包交付率、能耗与时延方面性能优异,可为复杂动态海洋环境中海面物联网数据的高效传输提供重要的技术途径.
2025,40(1):187-195, DOI: 10.13195/j.kzyjc.2024.0336
摘要:海洋环境复杂多变,为提升欠驱动无人船(underactuated marine vehicle,UMV)的自主航行与故障应对能力,提出基于有限时间正切漂角视线制导的指令滤波路径跟踪控制策略.在包括内部动力学未知、时变大漂角和执行器故障的复杂情况下,该策略可使UMV在有限时间内遵循所需的路径.首先,构建有限时间漂角观测器,用于快速精准地估计时变大漂角;随后,引入有限时间正切漂角视线制导律,不仅能提升制导性能,还能有效避免因非光滑制导指令产生高频震荡导致UMV失稳;此外,通过采用有限时间指令滤波控制技术降低计算负担,并提出滤波补偿方案减少滤波误差;最后,基于径向基函数神经网络和有限时间理论,设计自适应有限时间容错路径跟踪控制器,使得UMV的纵向速度和艏向角跟踪误差在有限时间内能够收敛到原点附近的小邻域.仿真实验验证了所提出方案的有效性和优越性.
2025,40(1):196-204, DOI: 10.13195/j.kzyjc.2024.0340
摘要:针对具有模型不确定和海洋环境扰动的微小型无人水下航行器无速度测量轨迹跟踪控制问题,提出自适应鲁棒积分有限时间预设性能渐近控制方法.构造预置期望收敛时间的预设性能函数与误差转换函数,将跟踪误差由受限状态转化为非受限状态,其中期望的收敛时间可预先设置且不依赖误差初始状态.在此基础上结合状态扩张观测器和误差符号鲁棒积分控制,提出复合扰动快速补偿与连续抑制相耦合的状态输出反馈控制器,其中线性状态观测器用于快速补偿未知速度和复合扰动,而连续误差符号鲁棒积分控制则进一步抑制估计误差和避免抖振.该设计不仅能保证跟踪控制的瞬态和稳态性能,还可避免鲁棒积分控制需要精确已知扰动微分上界的保守假设以及对高控制增益的依赖.稳定性分析证明了闭环控制信号在有限时间内渐近收敛.仿真结果验证了所提出控制方法的有效性.
2025,40(1):205-213, DOI: 10.13195/j.kzyjc.2024.0341
摘要:针对水下机械臂的末端轨迹跟踪控制问题,提出一种自适应快速反正切非奇异终端滑模控制器.首先,基于莫里森方程建立考虑水作用效应的水下机械臂动力学模型;其次,结合非奇异终端滑模控制和反正切函数特性,设计一种快速反正切非奇异终端滑模控制器,并基于径向基神经网络预测系统的未知扰动;然后,通过李雅普诺夫理论验证所提控制方法可在有限时间内收敛到期望位置;最后,通过仿真实验验证所提控制方法的有效性.
2025,40(1):214-222, DOI: 10.13195/j.kzyjc.2024.0344
摘要:无人船在拥挤水域中自主航行时,大量的其他船舶与静态障碍物、海洋环境扰动和无人船的不确定动态加剧了无人船的碰撞风险.针对此问题,设计无人船智能避碰决策与航迹跟踪控制方案.首先,根据无人船航行水域中其他船舶和静态障碍物的数量评估拥挤程度,并将其引入现有的船舶碰撞风险度评估函数,合理评估拥挤水域中无人船的碰撞风险;然后,创建双向长短时记忆神经网络,根据由无人船在过去有限时域内的航迹跟踪控制信号和驶过航迹组成的输入序列,估计在未来有限时域内基于无人船运动数学模型标称参数的无人船航迹预测误差.通过在线更新神经网络权重,使估计的航迹预测误差可被用于修正由无人船的不确定动态和遭受的海洋环境扰动导致的航迹预测误差,实现具有自学习能力的无人船航迹智能预测;最后,基于模型预测控制思想,求解以最小化无人船剩余航行距离和碰撞风险为目标,以无人船动态、无人船与其他船舶和静态障碍物的安全距离为约束的优化问题,获得避碰操纵的期望航迹和航迹跟踪控制信号.仿真和仿真结果表明,在所设计的智能避碰决策与航迹跟踪控制方案下,无人船自主航行的实际距离更短,与其他船舶的碰撞风险更低.
2025,40(1):223-230, DOI: 10.13195/j.kzyjc.2024.0345
摘要:针对多无人艇(unmanned surface vessels,USVs)编队系统中USV视野受限等问题,提出一种以无人机(unmanned aerial vehicles,UAV)作为多USV编队领导者的模型.针对UAV领导的多USV系统水空协同编队问题,设计一种固定时间的优化编队控制算法.在对USV、UAV进行三自由度动力学建模的基础上构建增广系统,并建立一个以优化控制输入及编队误差为目标的性能指标函数.所提出的辨识器-执行者-评价者结构的强化学习算法中,辨识器可以精确辨识系统中的未知非线性动态,通过评价者完成对最优性能指标函数值的评估、执行者更新控制策略两个步骤不断优化控制策略以逼近最优,进而利用Lyapunov方法证明UAV-USV系统编队误差能在固定时间内收敛.最后,通过仿真模拟验证了所提出算法的有效性.
2025,40(1):231-241, DOI: 10.13195/j.kzyjc.2024.0348
摘要:针对具有不确定动态和未知时变海洋环境扰动的欠驱动自主水下机器人(autonomous underwater vehicles,AUVs),提出一种基于事件触发通信机制的分布式固定时间三维编队控制方案.首先设计一种固定时间扰动观测器估计AUV不确定动态和未知时变海洋环境扰动组成的集总扰动,且观测器估计误差在固定调节时间内收敛到零;建立事件触发通信机制,降低多AUV之间的通信频率,节约通信资源;进一步,基于上述固定时间扰动观测器和事件触发通信机制,融合动态面控制技术和固定时间控制理论,设计分布式事件触发固定时间三维编队控制律.现有的固定时间扰动观测器和控制律均有两个幂次项,所设计的固定时间扰动观测器和固定时间编队控制律仅保留收敛速度较快的幂次项,可降低参数调节难度.理论分析表明,所设计的编队控制律能使多欠驱动AUV在固定调节时间内实现三维编队控制,仿真和比较结果验证了所提出控制方案的有效性和优越性.
2025,40(1):242-251, DOI: 10.13195/j.kzyjc.2024.0350
摘要:针对跟踪路径复杂、立体空间运动、模型参数动态变化、风浪流扰动下的多无人潜航器(unmanned underwater vehicle,UUV)协同路径跟踪问题开展研究.首先,针对UUV跟踪复杂路径情形设计自适应前视距离策略,使得UUV可以更好地跟踪复杂水下路径;其次,针对立体空间运动的UUV集群,设计三维视距制导律和协同控制律引导UUV集群在三维空间中沿参数化路径运动;最后,针对模型参数动态变化、风浪流扰动影响下的UUV集群,设计自抗扰控制器实现对动态变化模型、总扰动信息和速度信息的统一估计,保证动力学控制的稳定性.仿真结果验证了所提出基于自适应视距制导的无人潜航器三维协同路径跟踪控制方法的有效性.
2025,40(1):252-260, DOI: 10.13195/j.kzyjc.2024.0391
摘要:提出一种基于改进人工势场法且带有输入量化的欠驱动无人船编队协同避碰避障策略.借鉴导弹制导与控制机理,分层设计无人船运动学制导律与动力学控制律.首先,基于辅助变量法在无人船运动学子系统中设计分布式制导律,并引入改进人工势场法的斥力函数.通过重构制导律实现运动学层面的协同避碰避障以及欠驱动无人船期望轨迹的跟踪;其次,通过使用径向基神经网络对无人船动力学子系统中的外界干扰和系统未建模动态进行逼近,采用均匀量化器对输入变量进行量化并对量化过程进行线性描述,使得底层量化控制器无需预测关于量化参数的具体信息;在稳定性分析中,利用李雅普诺夫稳定性理论证明所设计USV编队跟踪控制系统的稳定性;最后,采用Matlab对理论策略进行仿真实验,仿真结果验证了所提出策略的有效性.
2025,40(1):261-270, DOI: 10.13195/j.kzyjc.2024.0512
摘要:针对一类具有多重扰动、不可测速度信息和执行器故障的无人艇系统,提出一种重复学习复合抗扰容错控制策略.首先,为了克服速度信息不可用的不足,提出一种新的集成故障-扰动估计器,实现故障与干扰之和的准确估计;然后,基于观测信息,通过设计一类比例微分型重复学习复合抗扰容错控制器来实现周期性轨迹跟踪,相比于传统比例微分型重复学习控制器,所提出基于观测器的重复学习控制器不需要利用测量输出的导数且具有更大的控制自由度;最后,通过对一类无人艇动力定位系统的仿真,验证所提出重复学习复合抗扰容错控制策略的有效性和优势.
2025,40(1):271-278, DOI: 10.13195/j.kzyjc.2024.0010
摘要:针对复杂海洋环境下自主无人航行器(autonomous underwater vehicle, AUV)编队协同控制问题,提出一种自适应量测-通信联合框架下基于鲁棒模型预测的编队控制策略.所提出方法能够避免基于水声广播的显式通信交互方式在水下复杂条件下的延迟和丢包等不利因素.首先,提出一种自适应量测-通信联合框架,利用非显式通信实现编队内部状态的观测,并引入自适应卡尔曼滤波对量测-通信链路中存在的外部扰动进行补偿;然后,在该框架下,设计辅助控制律并将其引入分布式鲁棒模型预测控制器,实现多条件约束下的AUV编队跟踪控制,并通过Hamilton函数和终端约束等理论验证编队控制器的稳定性;最后,通过对5艘AUV组成的编队在不同情景下的仿真结果进行对比分析,验证所提出方法的有效性.
2025,40(1):279-284, DOI: 10.13195/j.kzyjc.2024.0077
摘要:针对多自主无人船(ASVs)系统的时变多目标协同跟踪问题,提出一种新型分层有限时间优化调控算法. 首先,设计一个反映多ASVs系统在跟踪过程中能量消耗的目标函数;然后,开发一个有限时间优化估计器(FTOE),以在ASV形成特定编队的同时遵循期望轨迹的情况下最小化目标函数,目标轨迹是可变的,不恒定的;接着,在有限时间本地控制器(FTLC)中,通过跟踪FTOE,多ASVs系统的航行状态可在有限时间内以最小化目标函数的方式稳定在多个预定的各种时变轨迹附近;最后,给出有限时间稳定性的证明,并计算沉降时间.仿真结果验证了所提出分层算法的有效性.
2025,40(1):285-291, DOI: 10.13195/j.kzyjc.2024.0440
摘要:针对存在执行器故障、外界干扰和模型不确定的自主式水下潜航器系统(autonomous underwater vehicle, AUV),提出基于全驱系统(fully actuated system,FAS)方法的鲁棒自适应轨迹跟踪误差受限控制策略,使AUV能够渐近跟踪目标信号.首先,将跟踪误差相关的归一化函数和障碍函数与时变尺度函数相结合,提出误差受限全驱系统方法;其次,将径向基函数神经网络(radial basis function neural networks,RBFNNs)与误差受限全驱系统方法相结合处理系统中的不确定模型;进一步,设计自适应补偿机制处理执行器故障;再次 基于Lyapunov稳定性理论证明轨迹跟踪误差渐近收敛于零;最后,通过仿真结果验证所设计的鲁棒自适应轨迹跟踪误差受限控制器的有效性.
2025,40(1):292-299, DOI: 10.13195/j.kzyjc.2024.0510
摘要:研究非线性质量切换无人艇在拒绝服务攻击下的动态记忆事件触发动力定位控制问题.首先,建立一个切换模糊模型描述非线性质量切换无人艇系统,该模型同时考虑了船舶的非线性特征及质量变化行为;然后,提出一个包含记忆项的动态记忆事件触发机制,该机制可利用动态变量的历史信息调整触发阈值,进一步节约有限的通信资源,在此基础上,构造基于该动态记忆事件触发机制的控制器以补偿海洋扰动;接着,利用多Lyapunov函数策略给出拒绝服务攻击下质量切换无人艇系统动态记忆事件触发动力定位控制问题的可解性判据,在拒绝服务攻击下,所提出控制方案能够应对网络攻击导致的通信中断问题,确保质量切换无人艇在恶劣网络条件下仍能保持动力定位性能;最后,以一艘质量切换船为例,验证了该控制方案的合理性.
2025,40(1):300-307, DOI: 10.13195/j.kzyjc.2024.0142
摘要:针对多粒度概率语言下信息丢失以及未考虑主体心理行为的双边匹配决策问题,提出基于累积前景理论的多粒度概率语言非对称正态云(MPLANC)双边匹配决策方法.首先,定义多粒度概率语言非对称正态云及其可能度,用于处理和比较多粒度概率语言信息,既简单有效又最大限度地防止原始信息丢失;然后,构建基于MPLANC双向投影的非线性优化模型和MPLANC幂HM集成算子,以获得不同主体的属性权重和正负理想参考点;接着,考虑双边主体的心理行为,利用累积前景理论构建双边主体的前景值矩阵,依据前景值最大化构建多目标优化模型来确定最优匹配结果;最后,通过服务外包匹配算例验证所提出方法的有效性和实用性,并通过灵敏度分析和对比分析,进一步验证所提出方法的灵活性和优点.
2025,40(1):308-316, DOI: 10.13195/j.kzyjc.2023.1749
摘要:客货混运新模式为我国高速铁路运营管理带来了新的机遇和挑战.鉴于此,以最小化列车停站时间、货物滞留数量和运营成本为目标,以列车到发时刻、动车组编组和货物配装计划为决策变量,为客货混运下高铁运行图与货物配装方案协同优化问题构建一类整数线性规划模型.为验证模型的有效性,以京沪高速铁路为背景进行数值实验,并调用CPLEX软件求解.结果表明:在尽可能减小对客运服务影响的前提下,所提出方法能够通过灵活决策列车时刻表及增加列车编组,提高列车运力;与采用固定列车时刻表的货物配装优化方案相比,协同优化方法能够在小幅增加列车停靠时间的情况下大幅提升货物运输量,可为相关运营部门制定客货混运计划提供一定的理论支撑.
2025,40(1):317-326, DOI: 10.13195/j.kzyjc.2024.0078
摘要:手术部是医院的核心部门,合理制定手术计划有助于医疗资源的高效配置,对提升医疗服务质量至关重要.手术时长的不确定性为手术调度带来了挑战,为了应对手术时长的不确定性,基于历史手术数据,应用方差膨胀因子减少患者特征之间共线性.基于分位数回归刻画手术时长区间,构建患者特征驱动的手术时长不确定集;在此基础上,考虑术后重症监护室床位资源限制,建立鲁棒手术指派模型,决策开放的手术室和患者的手术日期,最后基于真实数据测试方法的有效性.实验结果显示,通过调节模型参数,所提出模型在降低运营成本和减少手术室加班时间方面优于确定性模型;与随机规划模型相比,在牺牲较少加班时长情况下,降低了总运营成本,并在求解时间上具有优势.
2025,40(1):327-335, DOI: 10.13195/j.kzyjc.2023.1755
摘要:针对六足机器人在复杂环境下如何决策出最优人机指令组合问题,提出将操控指令权限分配的过程分为离线和在线两个阶段.在离线阶段,将六足机器人运动过程中机身的稳定裕度、能量消耗和与障碍物的碰撞接触时间作为指令优选的约束条件,并建立评价函数实现在进入地形前获得最优的操控指令组合;在线阶段,依据上述3个约束条件量化有限状态机网络中的状态转移概率,并人为设置约束条件阈值作为触发条件,向最优的人机决策指令状态进行转换.最后利用半物理仿真系统进行实验,结果表明所提出的决策方法在稳定裕度上相对于其他操控方法提高约15%sim25%;能量消耗上降低了约10%sim50%;碰撞接触时间降低了约10%sim50%.
2025,40(1):336-344, DOI: 10.13195/j.kzyjc.2023.1408
摘要:在具有关键多部件系统的生产调度过程中,系统退化往往受多方面因素影响.生产加工期间的载荷、外部环境的冲击以及部件间的故障相关性都会造成系统不同程度的退化.因此,针对多源退化影响下的同构多部件生产系统,分析生产调度期间其关键部件和系统的退化特征,并构建相应的系统退化模型.在此基础上,提出生产调度与视情维修的联合策略,以调度作业的加工序列和预防性维修阈值为决策变量,最小化总加权期望完成时间为目标,构建考虑多源退化影响下的同构多部件系统生产调度与视情维修联合决策模型.据此进行部件级的平稳概率和系统级的联合概率的推导,并给出数值求解方法.在数值实验中,通过对比不同退化因素影响下联合决策模型的优化结果,证实在联合决策中考虑多源退化的必要性;经过参数的敏感度分析,验证所提模型的有效性.
2025,40(1):345-352, DOI: 10.13195/j.kzyjc.2023.1702
摘要:针对冗余惯性测量单元(inertial measurement unit,IMU)姿态估计问题,通过采用不变扩展卡尔曼滤波器结构,将被估计系统动态特性建模为矩阵李群和偏差向量的混合模型,从而设计基于协方差在线校正的局部IMU姿态估计器.在此基础上,采用对数映射将李群不确定性映射到向量空间,进而构造依赖于局部姿态估计器参数的分布式融合问题,从而设计基于李群的鲁棒协方差交叉融合准则.特别地,为解决局部估计器之间互协方差未知的问题,通过引入先验容差来约束未知互协方差,从而提供低保守性的协方差上界以提高融合估计性能,形成一种具有双层结构的冗余IMU姿态估计方法.最后在下肢外骨骼康复机器人平台上验证所提出算法的有效性.
优先出版时间:2025-01-06 DOI: 10.13195/j.kzyjc.2024.0634
摘要:牧羊控制方法逐渐被应用于机场鸟群驱离、无人机放牧、空地协同监视与引导等大规模集群运动协调问题。本文以牧羊无人机为例,提出了基于分层自主决策和深度Q网络(DQN)的自适应牧羊控制方法。首先,考虑离群个体活跃度衰减等因素,建立了牧羊控制问题的感知与运动模型。其次,针对个体滞留与离群问题,提出了GCM-Arc控制方法与避障策略,提升了羊群受控个体占比。最后,建立了分层自主决策模型,结合GCM-Arc控制方法与深度Q网络,提出了分层GCM-Arc控制方法,实现了控制模式自适应切换与参数自适应调整。数字仿真试验表明,本文方法在牧羊任务时间、无人机总路程、羊群平均半径、单体离群率和牧羊任务成功率方面,明显优于经典的GCM-V与Arc-Formation牧羊控制方法。
优先出版时间:2025-01-06 DOI: 10.13195/j.kzyjc.2024.0849
摘要:针对转向系统的延迟和道路曲率的变化会降低路径跟踪精度和稳定性问题,本文提出了一种采用延迟补偿和曲率增广的模型预测路径跟踪控制策略。首先建立1阶惯性模型表示转向系统因信号传输、机械摩擦引起的响应延迟,采集实车转角数据并利用粒子群优化算法完成转向延迟模型的参数辨识;在此基础上融合转向延迟模型到路径跟踪误差方程中以提高控制系统模型的准确性,并将曲率作为模型预测控制的增广量以减小曲率对跟踪精度的扰动;最后对所设计的控制策略进行仿真和实车试验。仿真结果表明,所设计的控制策略在大曲率转工况下的横向偏差和横摆角偏差分别降低了63.1%和7.5%,在双移线工况下的横向偏差和横摆角偏差分别降低了30.9%和43.4%,避免了转向延迟引起的转角振荡,提高了车辆路径跟踪精度和稳定性。实车试验结果表明,所设计的控制策略在双移线工况下的横向偏差和横摆角偏差分别降低了36.6%和30.4%,验证了控制策略的有效性。
优先出版时间:2025-01-04 DOI: 10.13195/j.kzyjc.2024.1074
摘要:随着低空经济进入快速发展期, 旋翼无人机凭借其垂直起降能力和高机动性等特点, 引起了人们的广泛关注. 在空中运输领域, 吊绳悬挂方式具有成本低、对负载体积无限制等优势, 因此具有更好的任务适应性. 然而, 旋翼无人机本身即具有欠驱动特性, 随着负载的引入, 系统的自由度更高、非线性程度和状态耦合也更为严重, 为其控制与规划带来了巨大挑战. 本文首先对无人机吊运系统进行分类并简要介绍其特性; 然后对单机和多机吊运系统的控制及规划方法研究现状与最新进展进行重点阐述; 最后对旋翼无人机吊运领域的已有研究进行讨论与总结, 并展望该领域未来的发展和趋势.
优先出版时间:2025-01-03 DOI: 10.13195/j.kzyjc.2024.1074
摘要:本文研究了一种环境搜索问题,利用地面多机器人系统查找细小物品。具体而言,地面多机器人系统将接收到的SLAM地图切割(subdivide)成房间,再将这些房间分配给各个地面机器人,以使随后的全覆盖搜索过程完成时间最快、地面机器人间无互相干扰。本文的主要创新点在于提出了一种基于双向连通边链表(DCEL)数据结构的(房间)区域处理算法,并提出了一种基于混合整数线性规划(MILP)的房间分配算法,两个算法构成了处理与分配方法。数值实验结果证明了处理算法的有效性、任务分配的均衡性安全性最优性以及其对异速地面多机器人系统的适用性,同时也在物理实验上验证了处理与分配算法的有效性。
优先出版时间:2025-01-03 DOI: 10.13195/j.kzyjc.2024.1072
摘要:针对冗余机械臂时间-冲击最优轨迹规划问题,本文提出了一种基于改进灰狼算法的最优轨迹规划器.首先,为了克服灰狼算法(GWO)开发和探索不平衡的局限性,提出了基于强化学习的灰狼算法(QLGWO)及其多目标版本(MOQLGWO): QLGWO使用Q学习指导灰狼个体基于经验和奖励选择探索或开发动作,实现算法局部和全局搜索的自主平衡; MOQLGWO引入存档和领导选择机制,在搜索衡量多种优化目标的帕累托最优解的同时,引导搜索方向朝未被探索的区域拓展,以逼近全局最优.其次,使用两段五阶多项式构造机械臂的运动轨迹,需要搜索的解由运行时间和中间点的关节位置、速度、加速度组成.最后,在12个基准函数上,将QLGWO与GWO和其他4种先进的元启发式算法对比,并使用MOQLGWO求解九自由度冗余机械臂的时间-冲击最优轨迹规划问题.仿真和实验结果表明,本文提出的QLGWO有效提高了GWO的性能;最优轨迹规划器能在满足关节约束的前提下获得安全、光滑的时间-冲击最优轨迹,其运行时间小于14 s,冲击处于-0.25 rad/s3至0.15 rad/s3之间.
摘要:随着四足机器人控制技术的逐渐发展,四足机器人已经广泛被应用于救援、军事、探险等领域.在四足机器人的应用中,如何在不牺牲控制性能的前提下有效降低能耗是一个重要的瓶颈问题.为此,本文提出了一种基于脉冲强化学习算法(SpikingReinforcementlearning,SRL)和中枢模式发生器(CentralPatternGenerator,CPG)的分层控制算法(SRL-CPG)用于四足机器人的运动控制.首先,考虑到脉冲神经元相比传统的人工神经元具有更低的能耗,本文基于脉冲神经网络(SpikingNeuralNetwork,SNN)构建脉冲强化学习算法,将其作为控制中枢.其次,在控制任务动作空间过大的情况下,SRL难以取得良好的控制效果,因此本文将CPG作为低级控制器,利用SRL接受状态信息并对CPG参数进行调整进而控制四足机器人运动.最后,SRL-CPG控制算法在本文于Webots环境中搭建的四足机器人模型Gbot上进行了实验验证,结果表明SRL-CPG控制算法能够有效应用于四足机器人的运动控制,并大大降低了能耗.
优先出版时间:2025-01-01 DOI: 10.13195/j.kzyjc.2024.1018
摘要:针对传统目标位姿跟踪在处理旋转运动时导致估计精度低和稳定性差的问题,本文提出了一种分布式目标位姿跟踪的序列无关融合估计方法.首先,在矩阵李群上构建状态和不变误差的动态方程,并将系统误差状态转移矩阵与估计状态解耦,更精确地描述和处理旋转运动中的不确定性,提高了滤波器的鲁棒性.其次,考虑到融合序列的随机性,设计了基于李群的序列无关融合策略,使得在任意融合序列条件下均可在李群上进行有效地数据融合,确保了全局估计的一致性.最后,通过仿真和实验验证了所提方法的有效性和优越性.
优先出版时间:2025-01-01 DOI: 10.13195/j.kzyjc.2024.0845
摘要:为解决车路协同环境下城市道路车道缩减路段车辆强制换道导致的通行效率和安全问题,基于博弈论思想提出了一种自动车辆协同换道控制策略.针对多车道缩减场景构建完全信息下的两方非合作博弈模型,并依据整体合理性条件和个体合理性条件判定将其扩展为合作-非合作博弈转化模型;在安全和效率收益函数中引入乘客行驶偏好,以适应不同乘客的驾驶风格倾性及增强车辆换道的类人化决策;然后利用收益等值思想求解博弈系统的那什均衡和基于夏普利值进行收益分配以得到两种模型中博弈车辆的最优控制策略.最后采用SUMO/TraCI与Python联合仿真方法对典型城市道路车道缩减场景进行实验验证.实验结果表明,基于两种博弈模型的协同换道控制策略在中高交通需求水平下均效果显著,且在车道缩减区表现出显著的局部效应;该控制策略不仅有效提升了车道缩减路区的交通安全和通行效率,还具有一定抑制交通震荡波的形成和传播、增加交通流稳定性的能力,可为未来车路协同环境下的自动车辆强制换道控制提供借鉴.
优先出版时间:2024-12-31 DOI: 10.13195/j.kzyjc.2024.0795
摘要:多无人机应急电力巡检的时间十分有限,在选择关键巡检目标时需要考虑各目标的故障概率差异,同时为提升巡检效率,可以引进换电站来降低无人机续航能力不足的影响.针对上述特点,将考虑多换电站的多无人机应急电力巡检路径规划问题建模为多站点多航次团队定向问题,并设计了一种融合软演员-评论家模型的遗传算法SAC-GA.首先,在遗传算法中加入两类局部搜索算子,以优化多无人机访问目标的选择和缩短无人机飞行路径距离.其次,提出了一种基于SAC模型的参数调优机制,利用SAC模型基于最大熵学习策略的优势,在遗传算法迭代过程中,根据历史学习经验和种群的状态动态生成合适的交叉、变异概率以及染色体再插入中的权距比.实验结果表明,算法在小规模实验和大规模实验上均具有明显优势,并通过消融实验验证了SAC-GA中局部搜索算子的有效性和本文参数调整方法的优越性.最后,通过案例分析验证了算法在不同应急场景下的有效性.
优先出版时间:2024-12-31 DOI: 10.13195/j.kzyjc.2024.0904
摘要:柔性作业车间调度是经典且复杂的组合优化问题,对于离散制造系统的生产优化具有重要的理论和实际意义.基于多指针图网络框架和近端策略优化算法设计了一种求解柔性作业车间调度问题的深度强化学习算法.首先,将“工序-机器”分配调度过程表征成由选择工序和分配机器两类动作构成的马尔可夫决策过程.其次,通过解耦策略解除动作之间的耦合关系,并设计了新的损失函数和贪婪采样策略以提高算法的验证推理能力.在此基础上,扩充了状态空间,使评估网络能够更全面地感知与评估,从而进一步提升算法的学习和决策能力.在随机生成算例及基准算例上进行仿真和对比分析,验证了算法的良好性能及泛化能力.
优先出版时间:2024-12-31 DOI: 10.13195/j.kzyjc.2024.1139
摘要:本文提出了一种具有自适应能力的非奇异快速终端滑模控制(non-singular fast terminal sliding mode control,NFTSMC)方法,可以有效提高受外部扰动和参数变化下的异步电动机速度控制性能。文中首先设计了一种具有自适应能力的非线性控制方法,可以在有效提高系统抗干扰能力和动态响应性能的基础上,抑制滑模抖振现象,且可以规划滑模收敛率。其次,本文提出的滑模负载转矩观测器(sliding mode load torque observer, SMLTO)可以保证在负载转矩发生波动时,快速准确地跟踪到实际转矩,从而减小了由负载转矩突变导致的速度波动,提高了控制精度和鲁棒性能。此外,文中所提方法采用了非奇异终端滑模控制方法,可以加快系统状态收敛速率,同时避免了传统滑模控制中的奇异性问题。实验结果表明,该方法显著提升了异步电机速度控制系统的鲁棒性和响应速度,具有良好的负载转矩观测性能。
优先出版时间:2024-12-31 DOI: 10.13195/j.kzyjc.2024.1178
摘要:为保障下肢失能患者主动康复训练的效果和安全性, 针对下肢康复外骨骼机器人设计一种基于非对称积分障碍李雅普诺夫函数的无力矩传感器导纳控制方法. 首先, 基于广义动量法设计一种滑模观测器, 用以实时估计人机交互力矩, 从而降低下肢外骨骼对力矩传感器的依赖. 其次, 面向下肢外骨骼构建一种导纳控制框架, 利用饱和函数将外环导纳模型生成的参考轨迹约束在预定的安全区间内, 以保证外骨骼的柔顺性与安全性. 此外, 针对内环步态轨迹跟踪设计一种基于非对称积分李雅普诺夫函数的反演滑模控制算法, 保障系统的输出约束性能与步态轨迹跟踪精度. 最后, 基于李雅普诺夫稳定性判据证明控制系统的稳定性, 并在下肢康复机器人实验平台上验证所提出控制算法的有效性和优越性.
徐森, 刘轩绮, 陈朝峰, 郭乃瑄, 卞学胜, 马芙蓉, 花小朋, 周天
优先出版时间:2024-12-28 DOI: 10.13195/j.kzyjc.2024.0874
摘要:为了捕捉网络的隐藏结构,减少社区检测模型对初始参数选择的依赖性,本文提出一种基于概率分布分层图聚类网络(Hierarchical Graph Clustering Network with Probability Distribution,HGCPD)的社区检测模型。首先,利用图卷积网络学习和缓存图中节点的特征表示;其次,引入一种基于节点对相似度概率的分层聚类方法,在不同层次上递归地构建社区结构;最后,探究模型超参数优化问题,设计贝叶斯优化方法自动调整参数,从而提升模型效率。在多个不同规模的网络数据集上的实验表明,HGCPD模型在社区检测的准确性、有效性均优于主流方法,并通过可视化验证了模型的可解释性。
优先出版时间:2024-12-25 DOI: 10.13195/j.kzyjc.2024.0775
摘要:车体质量偏心是无人自行车一个重要的性能参数,为了降低车体质量偏心对无人自行车航向轨迹的影响,提出一种基于有模型强化学习原理的概率推理学习优化(PILO)偏心校正方法.该方法以车体侧向倾角(倾角速度)、车把转角(转角速度)以及车把控制力矩为输入,以对应时刻车体侧向倾角速度(倾角加速度)以及车把转角速度(车把转角加速度)为输出,利用高斯过程回归(GPR)构建系统的概率动态模型(PDM)表征系统的不确定性动态,并将其用于后续的状态序列预测;将质量偏心作为车把PD控制器的一个参数,考虑车体航向与车把转角间的运动约束,通过车体航向角速度构造目标函数,优化并校正系统的质量偏心参数.设定八种不同的负载偏心开展无人自行车仿真及物理样机实验,结果表明,PILO系统校正的绝对误差不超过0.005rad,相对误差不超过10%,并且展现了一定的抗干扰能力;与无模型的认知学习偏心优化(RLO)校正系统比较,PILO系统在参数整定难度、智能化以及容错能力等方面具有一定优势.
赵丹丹, 王亚刚, 张一勤, 周康寿, 朱灵龙, 喻洪流, 孟巧玲
优先出版时间:2024-12-23 DOI: 10.13195/j.kzyjc.2024.1133
摘要:在智能助行器对有行走障碍的用户进行助力、跟随以及安全防护的过程中,智能助行器的主动避障行为是十分重要的。本文提出了一种基于模糊人工势场法(FAPF)的智能助行器人机共享控制策略,适用于智能助行器的局部路径规划需求。FAPF对传统人工势场法(APF)进行了优化,减少了APF容易陷入局部最小值和目标不可达的情况出现,并引入模糊自适应对APF斥力增益系数进行整定,以满足智能助行器在实际中的应用需求,提高算法的稳定性。FAPF在MATLAB仿真平台进行了实验,仿真实验表明,FAPF能够安全避开障碍物,目标点到达率为89.7%,并增强了智能助行器在复杂环境中的轨迹平滑度。同时,在智能助行器上的应用实验证明了FAPF的可行性和实用性,部署FAPF后,智能助行器能够在跟随用户行走过程中主动避开障碍物,引导用户选择更加安全的路径。
优先出版时间:2024-12-23 DOI: 10.13195/j.kzyjc.2024.0973
摘要:针对一类多智能体系统的非光滑约束优化问题,通过构造合适的时变增益函数和动态事件触发通信机制,提出了一种结构简单的基于动态事件触发的分布式预定时间优化算法. 与现有分布式非光滑约束优化研究工作相比,本文提出的算法主要有以下三点特征: 1) 收敛性能更优: 收敛时间可由设计者提前给定且收敛时间上界与系统初始状态及控制参数无关;2) 通信效率更高: 避免了传统连续时间/周期通信带来的通信资源浪费问题;3) 算法结构更简单: 无需传统的分数幂反馈及额外的辅助变量. 综合运用预定时间收敛理论、惩罚函数法、代数图论及凸优化理论,证明了系统决策变量在预定时间内收敛于最优解的可调邻域内,且不存在Zeno 现象. 仿真验证了我们所提算法的优势及有效性.
优先出版时间:2024-12-23 DOI: 10.13195/j.kzyjc.2024.0825
摘要:数据包络分析(Data Envelopment Analysis,DEA)是一种评价决策单元相对效率的数学规划模型,在管理决策领域得到了广泛应用。传统交叉DEA方法高度依赖于真实且准确的数据。当数据存在不确定性时,确定性假设下得到的DEA模型解可能会失去可行性,从而使得效率评价结果不可靠。针对这一问题,本文基于鲁棒优化方法,提出了一种鲁棒交叉效率DEA模型。其中,为避免多重最优解造成的交叉效率值不唯一问题,进一步建立二级目标模型来选择一组可接受的最优解。然后,引入鲁棒价格的概念来分析决策单元应对数据不确定性的能力,并在此基础上探讨了仁慈型和对抗型两种交叉策略的选择问题。最后,基于15个OECD国家的可再生能源数据,验证了本文所构建方法的可行性与有效性。
优先出版时间:2024-12-19 DOI: 10.13195/j.kzyjc.2024.0851
摘要:IaaS云产品定价与容量规划问题近年来引起广泛关注, 但现有文献尚未在资源互补与复用及捆绑销售的视角下研究该问题. 考察一个提供预留类与现货类云产品、具有两种互补性资源的IaaS提供商, 将资源复用纳入容量规划考量, 本文通过比较单独、捆绑和混合销售预留类产品时各模式下的最优定价、容量规划及IaaS提供商的利润, 分析了IaaS提供商和用户最偏好的销售模式. 研究发现: (1) IaaS提供商选择混合销售能实现最大利润, 若只能选择非混合销售, 在面临具有较强互补性的资源和对捆绑折扣价格较敏感的用户时, 选择捆绑销售, 反之, 选择单独销售. (2) 捆绑产品用户获益最大的模式是捆绑销售, 非捆绑产品用户获益最大的模式是混合销售. (3) 资源间互补性越弱, 捆绑销售的价格折扣越明显. (4) 资源复用使预留类产品定价更低、需求更大, 也使IaaS 提供商利润更高, 因此资源复用能使IaaS提供商和用户实现双赢. 本文为基于资源互补与复用的IaaS云产品捆绑定价与容量规划决策提供了理论支持和实践建议.
优先出版时间:2024-12-19 DOI: 10.13195/j.kzyjc.2024.0972
摘要:本文考虑了聚合博弈的隐私保护分布式纳什均衡寻求算法设计. 特别地, 我们考虑了该博弈不存在中心节点, 在这种情况下, 每个玩家无法直接获得用于策略更新所需的聚合策略信息, 本文采用动态跟踪一致性协议对其进行估计. 其中玩家用于估计聚合策略的状态量被认为是需要保护的敏感信息, 为了保护玩家的隐私, 利用相互独立的高斯噪声对玩家的梯度信息进行干扰. 通过将Frank-Wolfe方法和动态跟踪一致性协议相结合, 设计了时变通信拓扑下带约束聚合博弈的分布式纳什均衡寻求算法. 进而, 分析了算法实现$(\epsilon,\delta)$-差分隐私的方差界. 此外, 通过对聚合项估计误差的收敛性分析得到算法收敛的充分条件, 给出了算法的收敛性证明. 最后, 通过数值仿真验证了所提出的算法的有效性和收敛速度更快的优越性.
优先出版时间:2024-12-19 DOI: 10.13195/j.kzyjc.2024.0927
摘要:在服务型制造的背景下,设备维护策略选择在供应链中挑战与机遇并存。为了应对传统方法在面对复杂性和不确定性方面的局限性,并满足服务型制造产业对设备维护的需求,本文引入了概率语言术语集(Probabilistic Linguistic Term Sets,PLTS)的分析模型,提出了概率语言术语集的广义加权幂平均算子和概率语言广义幂有序加权平均算子,并证明了它们的优越性质,用于集结指标的评价信息。所提方法能够有效应对决策者在设备维护策略选择中存在的有限理性和主观经验的问题,克服依赖专家主观判断和忽视指标间关联关系的问题。最后将所提方法应用于服务型制造供应链设备维护策略的择优问题中,验证了所提方法的可行性和有效性,为服务型制造产业在设备维护策略选择方面提供了重要的参考,有助于提升维护决策的科学性和准确性。
优先出版时间:2024-12-16 DOI: 10.13195/j.kzyjc.2024.0603
摘要:随着装备产品精密化和商业环境复杂化,数量柔性化正在成为装备制造企业应对内外部制造环境干扰、实现最优制造总利润的重要途径。针对被忽略的制造结构、制造合格率、市场需求与数量柔性之间的内在逻辑关系,本文结合装备制造企业制造系统的串联结构特征进行理论建模与分析,以期回答“串联制造结构下装备制造企业如何选择最优匹配的柔性数量策略”这一问题。研究结果表明:与单环节制造结构相比,串联制造结构的最优数量柔性更大但制造总利润更低;串联制造结构的装备制造企业总有动机采用柔性数量策略;串联制造结构下,随着前序制造环节1的制造合格率提高,装备制造企业的最优数量柔性呈倒U型变化;随着数量柔性边际成本增加,装备制造企业的最优数量柔性与制造总利润降低。以上结论可为串联制造结构下装备制造企业柔性数量策略的制定与实施提供有益的参考。
优先出版时间:2024-12-15 DOI: 10.13195/j.kzyjc.2024.1061
摘要:供应链安全稳定是大国经济循环畅通的关键.在当今全球供应链竞争日趋激烈的背景下,供应链中断风险随之升高,维护供应链安全成为提升我国国际竞争力的重要保障.在此情形下,供应链安全日渐受到学术界和业界的关注与重视.然而,既有关于供应链安全的直接相关研究较为零散,研究问题凝练不足.为推进供应链安全的研究进展,本文基于2001-2024年发表在国内外供应链安全领域的中英文文献进行了系统性综述.本文主要从供应链安全的概念、维度、理论、前因、效果、研究方法与衡量指标等七个方面进行了回顾与梳理,构建了以供应链安全为核心的研究框架.据此,本文提出了供应链安全在未来研究中的主要方向,这为推动我国企业维护供应链安全,进行高质量的可持续发展提供了一定的理论与实践指导.
优先出版时间:2024-12-14 DOI: 10.13195/j.kzyjc.2024.0897
摘要:面对日益增长的卫星数量和多样化的任务需求, 在轨成像卫星群任务调度的难度不断提升. 现有方法大多针对小规模或单一类型的卫星和任务, 难以适应大规模卫星资源下多类型任务的协同调度需求. 针对上述问题, 本文提出了一种综合考虑多类型任务的成像卫星群调度模型与算法. 在模型构建方面, 本文设计了广义观测收益函数, 该函数能够统一评估包括普通点目标、周期性点目标和区域目标在内的不同任务类型的收益. 同时,模型还考虑了卫星资源的限制和任务的特定要求, 以确保生成的调度方案合理高效. 在算法设计方面, 提出一种深度强化自适应大邻域搜索算法 (An Adaptive Large Neighborhood Search Algorithm based Deep ReinforcementLearning,DRL-ALNS). 该算法利用深度强化学习的自主学习能力, 在自适应大邻域搜索框架中智能地进行算子选择和参数配置, 从而有效应对大规模搜索空间的挑战. 为了验证本文提出的方法的有效性, 将其与多种对比算法进行了实验. 结果表明,DRL-ALNS 在任务收益值上平均提升了 7.6%, 证明了其在解决多类型任务成像卫星群调度问题中的有效性和优越性.
优先出版时间:2024-12-13 DOI: 10.13195/j.kzyjc.2024.1055
摘要:移动太赫兹通信将赋能车联网、大容量无线回传、全息通信等未来业务愿景。为应对移动性和路径损耗带来的链路传输挑战,必须发展太赫兹大规模天线阵列通信。然而大规模阵列天线窄波束对准与追踪制约移动性。总结移动太赫兹通信需求、现状与技术瓶颈,提出感知协同方案。首先综述了针对瓶颈提出的基础理论,包括感知协同通信性能指标建模、性能均衡建模,以及时分、频分体制下的感知协同方案;之后总结感知协同太赫兹移动通信技术,包括波束赋形、信道估计、信道追踪、用于系统设计的感知协同通信仿真平台;最后介绍了感知协同移动太赫兹通信的应用试验,分别实现了太赫兹通信系统测距、太赫兹大规模液晶相控阵通信以及感知协同太赫兹大规模液晶相控阵移动通信,验证了所提技术的性能增益。
优先出版时间:2024-12-09 DOI: 10.13195/j.kzyjc.2024.0952
摘要:针对新能源大规模并网带来的消纳问题,提出一种考虑源荷双侧弹性资源的日前调度方法.首先对深度调峰机组、可平移负荷和可削减负荷的弹性调节能力进行分析,建立含弹性资源的电力系统调度模型;然后提出一种基于Conv-Seq2Seq(convolutional sequence to sequence)模型的日前调度方法,使用多层卷积神经网络作为编码器对负荷预测数据等信息进行提取,改进深度学习网络信息提取的能力和速度,并使用门控循环单元作为解码器对编码器提取的信息进行解码,以输出调度计划;最后通过辅助决策修正以确保调度计划的安全性.基于改进的IEEE39节点算例验证了所提方法的有效性和正确性.
优先出版时间:2024-12-06 DOI: 10.13195/j.kzyjc.2024.0403
摘要:针对目前牵引传动系统传感器故障诊断中存在的诊断对象单一、传感器信号间强耦合性未充分考虑可能导致的误报问题,提出了一种多传感器联合实时故障诊断方法。研究首先分析了基于现有传感器布局的可诊断生,并构建了可实现所有传感器故障可隔离的结构最小型超定方程集(MSOs)和故障特征矩阵。其次,基于每个MSOs对应的传感器信号集和相关系统机理知识,确定了数据驱动模型的输入输出信号、模型输入信号的阶次以及不同输入信号间的关联关系。接着,利用极限学习机(ELM)算法,基于历史正常数据样本建立每个MSOs的数据驱动模型,实现其输出值的有效估计,并生成残差序列,再结合故障特征矩阵实现不同传感器故障的有效检测与诊断。最后,采用采用半实物仿真与现场故障场景录波的虚实联合测试验证平台对所提诊断算法进行测试验证。验证结果表明,与现有方法相比,所提方法能实现牵引传动系统多传感器故障的快速检测与定位,具有良好的工程应用价值。
Junbao, 张建强, 董海迪, 随博文, 刘忠, 张媛媛
优先出版时间:2024-12-05 DOI: 10.13195/j.kzyjc.2024.0857
摘要:针对自主水面船轨迹跟踪的导引问题,提出一种基于新型导引向量场的轨迹跟踪导引方法。首先,为了简化导引律的设计,以轨迹点为原点构建Serret-Frenet坐标系,并在该坐标系下基于自主水面船运动模型构建轨迹误差模型。然后,考虑到相对位置对于自主水面船轨迹跟踪性能具有较大影响,设计了一种新型的导引向量场。该向量场利用分段函数为自主水面船在与轨迹点不同相对位置情况下提供相应的导引律,在保证相对稳定的艏向和速度的基础上实现高效精确的轨迹跟踪。此外,所提供的艏向角指令函数为光滑曲线,提高实际中指令的可执行性。其次,依据该向量场设计艏向和速度的导引律,基于Lyapunov稳定性理论证明系统的跟踪误差最终一致有界。最后,通过仿真验证该方法的有效性。
优先出版时间:2024-12-05 DOI: 10.13195/j.kzyjc.2024.0808
摘要:针对柔性关节机械臂控制精度低和轨迹跟踪控制动态性能差等问题,提出一种笛卡尔空间力补偿的轨迹跟踪控制算法,旨在提高笛卡尔空间轨迹跟踪精度. 首先,介绍了串联弹性执行器(SEA)和六自由度(6-DoF)机械臂系统模型,并设计了基于神经网络模型预测控制(NNMPC)的关节空间位置-速度-力矩混合控制算法. 随后,基于该关节控制器,设计了基于柔性关节机械臂的笛卡尔空间力补偿控制算法,该算法根据笛卡尔空间的跟踪误差,结合PID控制器计算出笛卡尔空间中的力补偿值,然后将其转换为关节力矩补偿值并补偿到关节控制器,以实现高精度的笛卡尔空间轨迹跟踪. 最后,通过仿真和实验验证了该控制器的有效性和优越性. 实验结果表明,设计的轨迹跟踪控制器整体精度为1.86mm,相较于无补偿的轨迹跟踪和基于位置补偿的轨迹跟踪控制算法,精度分别提升了2.91mm和1.77mm.
优先出版时间:2024-12-04 DOI: 10.13195/j.kzyjc.2024.0906
摘要:本文研究切换拓扑下多智能体系统的固定/预定时间优化问题, 提出基于指数函数的分布式固定/预定时间优化算法. 该算法由两阶段构成, 其中第一阶段确保智能体的状态在固定/预定时间内收敛到各自的局部最优状态, 从而消除零梯度和算法对系统初始状态位于其局部最优解处的要求; 第二阶段实现智能体的状态在固定/预定时间内收敛到优化问题的全局最优解. 利用凸优化理论、Lyapunov 稳定性理论, 分析算法在通信拓扑切换下的收敛性. 提出的两种算法均无需交换梯度及 Hessian 矩阵信息, 其设计不依赖符号函数, 且所需参数较少. 最后通过数值仿真验证上述理论结果.
优先出版时间:2024-12-04 DOI: 10.13195/j.kzyjc.2024.0814
摘要:干扰资源分配作为认知电子战的重要环节之一,旨在干扰资源有限的情况下,通过合理分配干扰资源达到最大的干扰效益。本文针对通信、导航受限的拒止条件下,无人机集群协同干扰多个可移动通信目标时由于环境状态空间过大以及环境非平稳导致多智能体强化学习(MARL)算法决策性能较差的问题,提出了一种基于自注意力机制的预训练自编码器(APSE),并将其作为MARL算法的前置单元对环境状态进行特征提取和降维,同时通过集中式训练分布式执行范式降低环境非平稳对算法决策性能的影响。在本文建立的无人机集群协同干扰仿真环境中的实验结果表明,加入APSE后的MARL算法在平均奖励和干扰资源分配效能上提升明显。其中,MAPPO-APSE在各项指标上表现最优,其在有效干扰占空比比相比MAPPO更长的情况下干扰资源消耗量降低了20%。
优先出版时间:2024-12-03 DOI: 10.13195/j.kzyjc.2024.0743
摘要:赤铁矿再磨过程是针对低品位赤铁矿的特有选矿过程,给矿压力控制是再磨过程的关键工艺过程。为了保证给矿压力的精确控制,本文将常规PI控制与信号补偿技术和强化学习相结合,提出一种智能PI控制方法。首先,将被控对象描述为低阶线性模型加频繁变化的未知非线性动态系统的形式,采用精确计算的前一时刻未知非线性项和闭环运行数据,设计补偿信号,叠加到PI控制器的输出,从而改善控制系统的动态性能。其次,利用闭环系统的实时运行数据,采用强化学习迭代求取最优的PI控制器和补偿器参数,保证闭环系统的稳定运行。最后,通过与已有方法的对比实验和工业过程真实数据的物理实验,实验结果表明了所提方法的优越性。
摘要:针对机坪环境下,多种类地面服务车辆的协同调度这一复杂的优化任务,本文提出了一种结合Transformer架构的深度强化学习算法。首先,依据航班地面服务流程的不同优先级,将整个地面服务任务进行分解,进而将原本复杂的多类型车辆调度问题转化为有先后顺序的单类型车辆调度问题。接着,利用Transformer架构对航班和车辆的特征进行自动提取,通过解码器按序列逐步求解任务调度,结合贪婪算法和蒙特卡洛模拟算法分别生成初步调度策略,并将这些策略应用于每个子问题的求解过程中。在此基础上,利用深度强化学习算法对整个模型进行训练,通过智能体与环境的交互来不断优化调度策略。此外,为了提升模型的鲁棒性和应对复杂情况的能力,本文还通过扩充真实数据集进行模型训练。最后,大量的实验证明,基于Transformer架构的深度强化学习方法能够有效避免不同种类车辆之间的相互干扰,并很好地应对真实环境下的航班调度需求。
优先出版时间:2024-11-26 DOI: 10.13195/j.kzyjc.2024.0710
摘要:无人蜂群作战是未来智能化战争的典型作战样式,本文立足于无人蜂群的高阶拓扑结构,研究蜂群内的信息流和控制流形成的不同拓扑结构的信息网络在面向复杂协同任务时其协同能力的变化.依据无人蜂群群体智能的关联规则,本文将无人蜂群信息网络设计为模块化的社团网络,搭建了最近邻耦合网络、随机网络、小世界网络和无标度网络四种模块内网络模型、随机连接和择优连接两种模块间关联关系,借助超图构建了任务协作组成的协同超边,结合高阶网络的超度、超度分布、同步指数等拓扑指标综合评估蜂群协同的质量和效率,并进行仿真实验,实验结果表明择优连接的小世界网络模型在设定任务下能更好的兼顾协同质量和协同效率,提高无人蜂群的任务协同能力.
优先出版时间:2024-11-25 DOI: 10.13195/j.kzyjc.2024.0949
摘要:针对直流微电网储能系统中存在的荷电状态(state of charge, SOC)不均衡、电流分配精度差以及直流母线电压偏差等问题,本文提出了一种提高均流精度的直流微电网分布式储能SOC加速均衡控制策略。首先,在基于双曲正切函数的自适应下垂控制中引入基于指数函数的变加速收敛因子,能够在限制下垂系数范围的基础上加快实现储能间的SOC均衡。为减小线路阻抗对电流分配的影响,对各个变换器进行虚拟压降均衡控制,同时对补偿量实施自适应调节,以达到减小线路阻抗对SOC均衡效果影响的目的。最后对母线电压进行二次电压补偿,解决下垂惯性导致的母线电压偏差问题。此外,提供了基于系统特征方程的稳定性分析,在理论上保证了直流微电网的稳定运行。最后,通过MATLAB/Simulink对所提控制策略的有效性进行了验证。结果表明,本文所提控制策略可有效提升SOC均衡速度和均流精度,使母线电压稳定维持在额定值。
优先出版时间:2024-11-25 DOI: 10.13195/j.kzyjc.2024.0666
摘要:面对重大突发公共卫生事件,单体城市的防疫资源总是有限的,而利用好不同城市感染错峰,协同调度好城市群内部的不同防疫人员及物资,可以有效提高应急救援效率。基于此,本文从感染错峰的视角,构建了一类涵盖应急医院选址、应急物资跨区域转运、医护人员跨区域支援的疫情应急资源跨区域协同调度优化模型。在该混合整数规划模型中,充分考虑了资源调度过程中的多重异质性、多周期下多决策耦合效应等。为便于模型求解,本文根据错峰协同调度问题特性,提出了两个新的逻辑不等式来添加切割。研究结果表明,面对重大突发公共卫生事件,患者的需求满足率才是决策者首要的考虑因素;在实施分级诊疗的过程中,应选择轻症宽松匹配策略而非最优的完全匹配策略;同时决策者也需要注意,应急救援物资量、医护人员数以及应急医院容量等重要参数均存在较为明显的阈值效应,这些研究结论可为重大突发公共卫生事件应急资源跨区域协同调度提供具体决策支撑。
摘要:当城市发生突发性事件时,高效的应急物资配送能力是降低生命和财产损失的有效途径之一。为提高城市应急物资配送效率和效果,提出一种基于进化多任务的多无人机协同路径规划算法(multi-UAV cooperative path planning algorithm based on evolutionary multi-task optimization,MCPP-EMTO)。在该算法中,将原多无人机应急配送问题作为主任务,并将不考虑无人机续航能力和容量约束的多无人机应急配送问题当作辅助任务。同时,所提算法将辅助任务得到有用演化信息迁移至主任务以提高求解效率。为验证所提算法的性能,设置三个不同的城市应急配送场景,并选用四种高性能多目标进化算法作为比较算法。仿真实验表明,相比四种比较算法,所提算法能够得到多样性和逼近性较好的帕累托前沿。
优先出版时间:2024-11-25 DOI: 10.13195/j.kzyjc.2024.0767
摘要:针对实际场景中难以获得带标签的故障数据,且训练数据与测试数据分布不一致导致诊断模型不适用的问题,提出了一种基于联合对抗域自适应网络(Joint Adversarial Domain Adaptation Network, JADAN)的跨工况故障诊断方法.首先,利用域对抗训练来提取源域和目标域的深层域不变特征,以提高诊断模型在目标域的泛化能力.提出一种基于Softmax预测和结构化预测的伪标签策略,使模型能够为无标签的目标域数据生成伪标签,同时,加入了类对齐模块,最小化源域和目标域之间的类原型距离,实现域与类的联合对齐,有效减少了决策边界附近样本被错误分类的概率.此外,在域判别器中引入了源域样本的权重分配机制,为每个源域样本自适应地分配权重,有效解决了模型训练过程中的负迁移问题,提升了模型的鲁棒性.实验结果表明,本文提出的方法能更有效地解决跨工况故障诊断问题.
优先出版时间:2024-11-22 DOI: 10.13195/j.kzyjc.2024.0915
摘要:为实现在轨任务所需的快速高精度的力/位控制,研究了双臂空间机器人在轨辅助对接操作的阻抗控制问题。首先,利用Lagrange方法建立了双臂空间机器人捕获操作后形成闭链混合体系统动力学方程;基于阻抗控制理论建立了二阶线性阻抗模型和二阶近似环境模型。接着,利用径向基神经网络(Radial Basis Function Neural Networks, RBFNN)对系统不确定因素进行分块逼近。然后,考虑有限时间内收敛的控制需求,引入添加了非线性项并经过分段式改良的快速非线性滑模面(Fast Nonlinear Sliding Mode Surface, FNSMS),并通过设计边界层函数来抑制所引入的滑模项带来的抖振。最后,通过Lyapunov稳定性判定验证了系统的稳定性。仿真结果表明,所提控制算法收敛速度快、稳定性好、鲁棒性强,可同时实现高精度的力/位控制,其姿态控制精度优于0.5°,位置控制精度优于0.001m,输出力的控制精度优于0.5N。满足双臂空间机器人在轨辅助对接操作的任务需求。
优先出版时间:2024-11-22 DOI: 10.13195/j.kzyjc.2024.0718
摘要:针对大多数现存高维多目标进化算法仍无法在高维空间中有效平衡种群收敛性与多样性的问题, 本文提出一种基于角分解辅助的多阶段高维多目标进化算法(Angle-decomposition assisted Multi-stage Evolutionary Algorithm for many-objective optimization, AMEA). 该算法协作角分解机制与多阶段自适应删除策略来逐一淘汰种群中性能较差的个体, 进而平衡种群的收敛性和多样性. 前者选取一对夹角最小的个体, 其意味着它们最为相似; 后者根据种群的进化状态自适应地淘汰这对个体中性能较差的个体. 当种群处于未收敛于Pareto前沿状态时,该删除策略淘汰收敛性较差的个体, 以加速种群收敛. 如果这对个体具有相同的收敛性, 该删除策略淘汰多样性较差的个体. 反之, 该删除策略利用所设计的综合性能指标来淘汰收敛性和多样性都较差的个体, 以提升种群的综合性能. 此外, 该算法设计了径向空间投影的匹配选择策略来选取收敛性与多样性好的个体进入交配池, 进而提高算法探索高维空间的能力. 实验结果表明,AMEA在处理高维多目标优化问题时有较强的竞争力, 能有效地平衡种群的收敛性与多样性.
李阿辉, 刘锦元, 付明磊, 高魏磊, 官柏平, 应鑫森, SYCHOU Uladzislau
摘要:针对基于图搜索的路径规划算法难以在连续空间中找到最优路径和基于采样的路径算法路径生成效率低的问题,本文提出了一种基于凸剖分知情采样的最优路径规划算法(Informed Sampling of Convex Dissection, CDI-RRT*)。首先,该算法对静态地图进行凸剖分并建立拓扑图,在拓扑图的指引下使用A*算法生成初始路径并使用弹性带算法对其进行优化,从而获取初始局部最优路径;之后,该算法在拓扑图的指导下构建初始树,并结合剖分线约束与Informed-RRT*算法的知情集约束构建动态采样域,通过在动态采样域中随机采样来优化初始树,进而规划出最优路径。最后,本文将CDI-RRT*算法与目前先进的最优路径规划算法在仿真以及实际场景下进行实验对比。实验结果表明,CDI-RRT*算法在初始路径生成效率、最优路径的生成效率等核心指标上均优于对比算法,充分验证了该算法的可行性与有效性。
优先出版时间:2024-11-22 DOI: 10.13195/j.kzyjc.2024.1063
摘要:针对扩展置信规则库(Extended Belief Rule Base, EBRB)的规则冗余与激活规则一致性过低问题,本文提出了一种基于Relief算法框架下的新型结构优化框架与激活因子的推理模型,该模型能够应用于机器学习中的分类问题与回归问题。具体地,基于Relief算法思想,首先通过分析历史数据与其近邻的输入输出相关性,赋予扩展置信规则不同的权重以识别关键规则,并通过与近邻规则的融合实现规则约减。然后,本文在计算个体匹配度过程中引入了激活因子,并通过离线优化策略来确定激活因子取值,以确保激活规则的一致性和有效性。最后,为了验证所提出模型的有效性和优越性,本文分别采用非线性函数与公共分类数据集,对所提方法与其他类型的EBRB模型在处理回归问题和分类问题时的表现进行对比。
优先出版时间:2024-11-22 DOI: 10.13195/j.kzyjc.2024.0965
摘要:随着定制化制造需求的增加,分布式柔性作业调度问题涉及的调度任务复杂多变,多产线制造设备动态重构,人机料法环协同约束倍增.面对多场景任务调度需求,单一进化算法难以适应不同场景,且由于算法对这类复杂约束问题评估时间成本较高,逐场景调用算法生成调度方案十分耗时.为解决这一问题,本文建立了分布式柔性作业车间调度问题数学模型,并提出基于向量映射代理模型(VMSM)的调度算法.VMSM通过高维特征向量映射进行特征提取,以增强对历史相似问题的识别能力,并在进化算法中辅助生成初始解和评估解集,提高搜索效率.实验结果表明,该方法能够将相似调度方案的分类准确率提升25\%-35\%,有效减少进化算法初始解筛选和解集评估次数.在不同场景复杂度下,VMSM均能在保障调度方案质量的前提下,显著提高分布式柔性作业车间调度方案生成速度,方案生成时间最多缩短51.26\%.
优先出版时间:2024-11-22 DOI: 10.13195/j.kzyjc.2024.0778
摘要:能源系统的安全性和可靠性是临近空间无人飞行器实现长航时驻空飞行任务的首要前提. 本文首先对临近空间无人飞行器能源系统实验平台及其运行原理进行介绍,分析能源系统中容易发生的典型故障;然后,阐述能源系统故障诊断研究进展,总结已有方法的有效性及不足之处;最后,考虑临近空间无人飞行器能源系统的实际需求,探讨未来有待研究的问题和方向.
优先出版时间:2024-11-21 DOI: 10.13195/j.kzyjc.2024.0770
摘要:本文提出了一种随机模型预测控制(stochastic model predictive control,SMPC) 算法, 适用于具有有界加性噪声和不完整状态信息的线性离散时间系统. 首先, 假设噪声的一阶矩和二阶矩已知, 利用Chebyshev-Cantelli不等式将施加在状态和输入上的概率约束重新表述成确定性形式. 然后, 在高效模型预测控制(efficient model predictive control, EMPC) 的框架下设计了基于观测器的输出反馈控制器? 再者, 引入附加的摄动量, 采用“离线计算、在线综合”的方法来最大化初始可行域并计算控制律. 最后, 给出了一个平均渐近性能指标的上界,证明了所提算法的递推可行性. 文末给出了仿真结果, 以证明该算法的有效性.
摘要:在进站安检智能化进程中,对于行人是否携带了行李物品的识别研究是必不可少的。针对在行人检测任务中,忽视了对其携带的物品一并进行检测,且在复杂场景中由于多尺度和遮挡导致误检和漏检等问题,提出了一种在安检场景的行人及携带物同步识别的方法。构造了一种易部署的轻量级深度学习网络模型PCD-MLNet检测行人及携带物目标。使用改进的HGNetV2作为模型的主干网络,提取不同尺度的输入特征。提出了一种可扩张的多分支残差模块DMRModule,结合大核卷积操作,增强行人及携带物特征提取的层次性和细节感知能力。使用EIoU作为检测网络的定位回归损失函数,提高模型对目标的定位能力。在创建的行人-携带物数据集实验中,PCD-MLNet取得了良好的性能,检测精度达到72.3%。对冗余通道剪枝之后,最终模型的参数量较基准模型下降了58.6%,视频推理速度提升35.0%。在仿真平台上的模拟安检实验也获得良好效果。
摘要:针对代理优化中样本策略贪婪特性使其后期收敛缓慢且解的精度不高问题, 提出了一种协同改进聚合策略, 并进一步拓展为面向昂贵黑箱问题的高效代理优化方法. 所提策略采用切比雪夫分解将概率改进和均值改进准则集成,通过随机权重系数实现全局探索和局部搜索能力的平衡. 此外,从候选点集视角出发, 分析了代理优化与代理辅助优化方法二者的不同, 进一步挖掘随机因素在优化设计中的作用. 试验结果表明: 该方法可有效提升昂贵黑箱问题优化解的收敛精度; 与同类方法相比, 该方法在解的精度和稳健性方面具有一定优势.
摘要:四足机器人由于其特殊的腿部结构能够适应各种复杂地形, 而现在的基于虚拟模型的 QP(二次规划)算法研究大多未考虑地形信息或考虑不够全面, 在复杂地形下稳定性和精确性受到限制. 本文提出了一种基于机器人本体感知系统估计地形复杂度的方法, 并基于此方法改进了四足机器人控制器, 提升其在非结构化地形下的稳定性. 本文首先利用了四足机器人的本体感知能力、足端运动学以及质心动量反馈设计了一种综合性的地形复杂度估计函数, 将四足机器人的地形评估与动态性能评估结合在一起评价地形复杂度. 然后在四足机器人虚拟模型控制的基础上, 在支撑相加入利用地形复杂度估计函数的外力干扰补偿与支撑力约束, 提升控制算法在支撑相的稳定性, 在摆动相则利用估计函数进行落足点规划并调整步态周期, 提升机器人的动态能力与适应性. 为了验证本文提出方法的有效性, 利用四足机器人 UnitreeA1 仿真模型与 webots 仿真软件设计了一系列实验, 实验结果证明本文提出的方法能有效提高四足机器人在非结构化地形上工作时的稳定性.
优先出版时间:2024-11-20 DOI: 10.13195/j.kzyjc.2024.0870
摘要:非接触操控在工业领域有着重要应用需求,然而在高维度场景下灵活快速地非接触操控仍是业界挑战。为此,研究基于深度强化学习(Deep Reinforcement Learning, DRL)的高维度非接触磁悬浮操控系统,简称Maglev-Delta机器人。其中,从理论层面给出稳定磁悬浮操控基本条件,提出可控区域最大化磁铁布局方案,实现高维悬浮操控执行模块设计。提出磁场强度非线性化弱化方法,解决了原始磁场在磁铁近处困住执行器导致DRL控制器训练样本稀缺问题。构建兼顾移动速度和悬浮精度的奖励函数模型,提高了控制器操控性能。实验表明,所搭建Maglev-Delta机器人能以较高的速度和精度完成二维和三维悬浮控制任务,展现出优越的灵活性。尤其在模拟搬运任务中,机器人能够稳定完成负载搬运任务。由实验结果推理可知,规模化的Maglev-Delta机器人可实现在约27×27×27 m3区域内操控3.8×10? kg重物,展现出巨大的非接触操控应用潜力。
优先出版时间:2024-11-20 DOI: 10.13195/j.kzyjc.2024.0803
摘要:针对多智能体系统包容控制中跟随者和领导者存在的通信资源受限问题, 提出一种基于混合事件触发机制的有限时间包容控制方法, 将多智能体系统中的事件触发机制由跟随者拓展应用到领导者上. 首先, 分别为跟随者和领导者设计专属的事件触发函数, 实现了跟随者的事件触发式的通信以及控制器更新, 还实现了领导者的事件触发式通信. 其次, 在触发函数中设计了状态依赖的自适应参数可以动态地调整触发阈值, 减少事件触发序列. 将所提出的方法应用在有向拓扑结构下的包容控制问题, 在有限时间内能够实现包容控制目标. 最后, 通过仿真表明该方法的有效性.
优先出版时间:2024-11-19 DOI: 10.13195/j.kzyjc.2024.0759
摘要:研究全部子系统均不稳定切换线性系统在模态依赖区间驻留时间(MDIDT)切换下的有限时间混合无扰切换故障检测滤波器(FDF)设计问题. 首先,为了改善故障检测系统的暂态性能,提出一种直接限制切换时刻残差信号和速率信号总颠簸幅度的混合无扰切换性能. 然后,通过将驻留时间区间分段,构造保守性更低的时变离散Lyapunov函数,得到增广系统在MDIDT切换下有限时间稳定且满足有限时间H∞性能的充分条件. 在此基础上,给出有限时间混合无扰切换FDF的设计条件。最后,通过数值仿真验证所提出方法的有效性和优越性.
优先出版时间:2024-11-19 DOI: 10.13195/j.kzyjc.2024.0422
摘要:本文研究时变厚尾非高斯噪声系统的状态估计问题.基于最大相关熵准则的卡尔曼滤波算法具有计算负担小且能够抑制多种类型非高斯噪声的特点, 现有方法大都采用高斯核函数进行设计, 且现有核带宽自适应选取能力有限. 针对现有方法存在的问题,本文采用学生t核函数替代现有方法中常用的高斯核函数来更加充分的利用非高斯噪声的厚尾分布信息, 进而定义了一种新的代价函数, 并推导出一种基于学生t核的最大相关熵卡尔曼滤波. 随后针对所提算法的单一固定核带宽在面对非高斯噪声特性时变时估计精度下降的问题,引入交互多模型框架来实现对多个核带宽的自适应选择, 通过运行多个具有不同核带宽的子滤波器,利用似然函数来更新不同子滤波器的概率,并利用每个子滤波器估计值的加权融合得到最后的后验估计.目标跟踪的仿真实验表明,所提出的算法与同类算法相比具有更好的估计精度.
优先出版时间:2024-11-19 DOI: 10.13195/j.kzyjc.2024.0963
摘要:密度峰值聚类算法 (DPC) 可以识别出任意形状的簇,但对于存在多密度峰值的簇,DPC可能会识别多个簇中心点,导致簇划分错误。为此,本文提出一种基于低密度分数的密度峰值聚类算法 (LS-DPC)。该算法首先使用低密度分数放大数据点的密度差异、缩小整体密度差异大的相邻区域的密度差异,使单个簇内所有区域的密度分布都重构为单峰密度分布,然后根据低密度分数自动获得子簇簇中心点。得到子簇后根据密度相交条件对子簇进行融合,完成聚类。将提出的LS-DPC算法与k-Means、SC、DPC、DN、Extreme和ICKDP算法进行对比,实验结果表明算法在复杂数据集和UCI数据集上表现优于对比算法。
优先出版时间:2024-11-14 DOI: 10.13195/j.kzyjc.2023.1796
摘要:在无人仓库系统中,解决自动导引车(AGV)之间的碰撞、死锁以及路径规划问题至关重要。本文提出一种用Petri网对仓库环境中AGV系统进行建模的方法,有效解决了AGV运输货物时产生冲突的问题。在此基础上,提出一种多智能体深度强化学习AGV路径规划框架,视AGV路径规划问题为部分可观测马尔科夫决策过程,将深度确定性策略梯度算法扩展至多智能体系统,通过设计AGV的观测空间、状态空间、动作空间以及奖励函数实现Petri网中AGV无冲突路径规划。由于在设置奖励函数时加入了Petri网触发条件后的反馈,极大程度减少了AGV运输货物时拥塞的产生,增加了仓库在规定时间内的送货总量。此外,由于本文提出的框架将路径分支点设置为智能体,有效地应对了多个任务起点随机产生以及环境中AGV数量时刻变化的情况,提升了神经网络泛化能力。仿真实验在AnyLogic软件平台中进行,通过对比不同AGV规模下的货物运输情况以及奖励函数中有无Petri网条件正负反馈的对照实验,验证了该路径规划方法的可行性和有效性。
优先出版时间:2024-11-11 DOI: 10.13195/j.kzyjc.2024.0917
摘要:针对压电微动台的非线性特性以及多轴解耦控制挑战,提出一种基于动态相互学习策略的改进型鸽群优化算法Pigeon-Inspired Optimization(PIO)并提出结合分数阶控制(FOPID)的DMLPIO-FOPID的控制策略进行实验研究。首先,对压电微动台进行力学分析,使其非线性特性近似线性化。然后,根据动态相互学习策略建立动态相反学习种群,以提升鸽群优化算法的寻优性能;引用了一种基于稀疏回归算法的迟滞辨识方法对压电微动台的迟滞逆模型进行补偿,再次,搭建了压电微动实验平台对所设计的控制器进行了实验研究。实验结果表明,DMLPIO-FOPID控制器在四种评价函数的优化测试中性能最佳,平均领先果蝇优化和鸽群优化这两种分数阶控制器19.28%,20.73%。并且在搭建的压电微动台的三轴测试中,均方差最小,收敛时间最短。说明DMLPIO-FOPID控制方法有助于实现压电微动台的精密控制。
优先出版时间:2024-11-07 DOI: 10.13195/j.kzyjc.2024-0700
摘要:复杂工业过程往往存在快、慢耦合动态特性, 应用常规的串级设计思路难以保障整体运行优化性能,而现有整体设计运行优化控制的方法容易发生``维数灾""和``病态数值""问题. 鉴于此, 本文聚焦一类设备单元和运行过程模型参数皆未知的复杂工业过程, 提出一种基于奇异摄动的快慢并行强化学习组合非串级运行优化控制方法. 首先, 引入收敛因子将复杂工业过程运行优化控制问题建模为双时间尺度系统的非串级最优控制问题; 其次, 使用奇异摄动理论将原始最优问题分解为降阶快子系统最优调节和慢子系统最优设定值跟踪问题; 然后, 在强化学习的框架下, 设计数据驱动的迭代算法学习快、慢子系统最优控制器, 进而构造不依赖于系统模型的组合最优控制策略. 与现有方法相比, 本文所提运行优化算法不仅能解决设备单元模型参数未知问题, 还能实现对期望运行指标的零误差渐近跟踪. 最后, 通过赤铁矿混合选别浓密过程对比实验验证所提方法的有效性和先进性.
优先出版时间:2024-10-31 DOI: 10.13195/j.kzyjc.2024.0676
摘要:稳定稀疏探索树(Stable Sparse RRT, SST) 是一种基于采样的渐近最优运动规划算法, 与传统的渐近最优算法RRT* 相比, SST 采用随机前向传播来生成新节点,无需求解两点边值问题(Boundary Value Problem, BVP), 即可直接规划出一条满足机器人运动学和动力学约束的可行轨迹. 针对SST 对参数敏感, 难以适应复杂多变的环境等问题, 提出一种基于自适应参数的SST 算法(Adaptive SST, ASST), 利用规划过程中的节点碰撞率和节点密度等已知信息, 对节点所处的环境区域和邻居信息进行估计, 自适应地改变节点选择半径和节点剪枝半径. 本文对多种系统动态和复杂环境类型进行了仿真验证, 仿真结果表明该算法能降低对参数的依赖性, 在复杂困难环境中能够求解成功率和计算效率, 对不同规划问题具有较强的适应性.
优先出版时间:2024-10-31 DOI: 10.13195/j.kzyjc.2024.0724
摘要:惯性参考单元(Inertial Reference Unit, IRU)是抑制运动载体光电跟瞄系统载体振动干扰的有效手段。IRU系统指向精度受机械谐振、传感噪声、驱动器输出纹波、基座角振动等内外部扰动影响,不同扰动的来源、特征均有所不同。本文对IRU系统的多源异质扰动抑制方法展开研究,分析系统内外部扰动来源、特征的基础上,提出改进型扰动观测器(Refined Disturbance Observer, RDOB)结构,实现系统窄带大幅值扰动的抑制,结合扰动前馈结构,进一步提升系统对外部扰动的抑制能力,并通过仿真和实验验证了控制方法的有效性。结果表明:基于RDOB与扰动前馈技术的控制结构能够实现100Hz的位置控制带宽,多源异质扰动作用下的闭环指向精度为1μrad, 对20Hz外部扰动的抑制能力可达-32.03dB, 0.1mrad、20Hz外部扰动作用下, IRU系统对0.2mrad、1Hz正弦信号的跟踪精度为6.1μrad。
优先出版时间:2024-10-31 DOI: 10.13195/j.kzyjc.2024.0356
摘要:本文利用自适应评判控制方法研究了具有非对称约束的连续时间零和博弈问题. 首先, 建立了一种新颖的非二次型函数来处理非对称约束问题, 这放松了对控制矩阵的限制. 其次, 推导出了最优控制, 最坏扰动, 以及Hamilton-Jacobi-Isaacs方程. 然后, 建立了一种自适应评判控制方法来近似最优代价函数, 从而获得近似最优控制以及近似最坏扰动. 值得一提的是, 针对具有非对称约束的零和博弈问题, 本文提出了一种新型评判学习准则来强化学习过程并且消除对初始容许控制的依赖, 这在以往论文中是没有被考虑的. 此外, 利用Lyapunov方法证明了系统状态和评判网络权值近似误差的稳定性. 最后, 利用F-16战斗机和倒立摆两个实例来验证本文所提算法的有效性. 同时, 为了进行比较, 给出了传统学习算法下的仿真结果, 进一步说明本文所提新型学习准则的可行性.
优先出版时间:2024-10-25 DOI: 10.13195/j.kzyjc.2024.0288
摘要:为提高约束进化算法处理各种不同约束高维多目标优化问题的精确性和鲁棒性,本文提出一种基于自适应双阶段分级均衡的约束高维多目标进化算法.该算法将多阶段优化方法和混合约束处理技术相结合,首先通过动态个体支配关系设计分段时机,并自适应地切换进化过程的目标优化和约束处理两个阶段;然后依据种群进化信息构建了混合分级均衡准则,利用自适应随机排序法在不可行状态选择个体,并在半可行状态下定义了半可行性准则以选择个体,从而保持可行解和不可行解的动态均衡,提高种群的收敛性、分布性和多样性.标准测试函数集C_DTLZ、DC_DTLZ和MW的大量实验表明了本文算法对不同目标维数以及狭窄、离散或互不连通可行域的约束高维多目标问题均能取得较好的收敛性能和稳定性,相对于MOEA/D-FCHT、MOEA/D-2WA、PPS、ToP和Trip五种先进方法,具有更高的收敛精度和更好的鲁棒性.
优先出版时间:2024-10-22 DOI: 10.13195/j.kzyjc.2024.0835
摘要:研究了一类受扰非线性系统基于事件触发策略的预设性能跟踪控制问题. 引入非线性扰动观测器以获得系统中未知扰动的估计, 同时在控制设计中引入一个具有时变衰减率的预设性能函数. 借助于指令滤波和迭代设计算法, 构造了一种事件触发预设性能跟踪控制器, 它不仅保证了跟踪误差始终满足预设性能指标, 而且具备良好的扰动抑制能力. 所使用的具有时变衰减率的性能函数与传统常值衰减率的性能函数相比, 有效地避免了初始阶段控制量过大的问题. 最后, 通过数值仿真验证所提方法的有效性.
优先出版时间:2024-10-21 DOI: 10.13195/j.kzyjc.2024.0623
摘要:针对复杂产品的批综合调度问题,建立以最小化总完工时间为优化目标的数学模型,提出一种基于解码逆向反馈调整机制的批综合调度算法。该算法采用遗传算法对问题进行求解,设计了一种适应于动态组批的双层染色体编码结构,分析了批处理设备的组批规则,推导出确切的非组批判断条件,在此基础上,提出了一种兼顾单步检查组批误判和多步组批工序统一调整功能的主动解码方法。同时,为了进一步提高算法的性能,又提出一种用于修正组批判断染色体串的解码逆向反馈调整机制,实现与解码染色体的双向互动和优良信息共享。仿真实验结果表明,所提算法通过采用设计的双层染色体编码、主动解码方法和解码逆向反馈调整机制,在解决研究问题方面明显优于其他对比算法。
优先出版时间:2024-10-21 DOI: 10.13195/j.kzyjc.2024.0784
摘要:针对多无人机在高动态近距空战中自主决策困难且协同性差等问题,提出了一种基于 MAPPO 的多无人机分布 式动态任务分配方法.首先,考虑任务可执行约束和无人机载荷约束,建立以敌方无人机为目标、攻击战术为任务的 多无人机动态任务分配模型;其次,设计了包含分离式状态滑动标准化机制、动作屏蔽机制以及注意力机制的任务 重分配网络,该网络可有效处理 MAPPO 算法在状态滑动标准化过程中的信息失真问题,并确保任务分配过程严格 满足任务约束,同时可基于攻击目标专注于攻击战术的选择,实现多无人机的协同分布式动态任务分配;最后,在 3v3 近距空战场景中,搭载所提算法的我方无人机与搭载空战决策专家系统的敌方无人机进行空战对抗,其作战胜 率高达 98.5%,所得结果验证了该方法的有效性.
优先出版时间:2024-10-17 DOI: 10.13195/j.kzyjc.2024.0830
摘要:本文针对欺骗攻击下动力学信息未知的线性离散系统, 提出一种非策略Q-learning算法解决系统的最优跟踪控制问题. 首先, 根据欺骗攻击的特点建立控制器通信信道遭受攻击的模型, 结合参考命令生成器构建增广跟踪系统. 在线性二次跟踪框架内将系统的最优跟踪控制表达为欺骗攻击与控制输入同时参与的零和博弈问题. 其次, 设计一种基于状态数据的非策略Q-learning算法学习系统最优跟踪控制增益, 解决了应用中控制增益不能按照给定要求更新的问题, 并证明在满足持续激励条件的探测噪声下该算法的求解不存在偏差. 同时考虑系统状态不可测的情况, 设计了基于输出数据的非策略Q-learning算法. 最后, 通过对F-16飞机自动驾驶仪的跟踪控制仿真, 验证了所设计非策略Q-learning算法的有效性以及对探测噪声影响的无偏性.
优先出版时间:2024-10-17 DOI: 10.13195/j.kzyjc.2024.0584
摘要:为应对24小时全时段视频监控需求,行人重识别任务必须要同时应对单模态与跨模态重识别的挑战,但目前的行人重识别任务通常将单模态与跨模态作为两个分支独立研究,忽视了这两个任务互补的应用价值.为应对这一挑战,本文提出一种可协同训练单模态和跨模态行人数据集的可迁移网络架构,通过三路分支网络深入挖掘每个模态的行人信息,并深入探讨了协同优化架构中的域间隙和模态样本量不平衡问题,有效实现多任务的优化问题.针对域间隙的问题提出了一种低层级特征拉近策略,显著减少了跨域样本特征间的差异,使得模型能够学习并提取域不变的语义特征.同时,为了解决模态样本量不平衡的问题,设计了一种弱模态特征挖掘策略,通过灵活调整训练权重,使模型更加关注弱模态的优化.实验结果表明,所提出的框架可以迁移到使用ResNet作为主干网络的众多主流方法上,其中在经典方法AGW的基础上Rank1和mAP分别提高了23.79%和17.78%.
优先出版时间:2024-10-16 DOI: 10.13195/j.kzyjc.2024.0618
摘要:离线强化学习旨在从固定的静态数据集中学习策略,这种数据驱动的学习范式为强化学习从模拟环境到真实世界的转变提供了极大可能。然而,离线数据集通常是由不同水平的策略收集而来的,其动作分布呈现出一种难以表达的多峰状态。并且,离线数据集中的高回报轨迹较为稀缺,使得策略学习的效率低下。为此,本文提出一种基于优势约束扩散策略的离线强化学习方法。首先,利用扩散模型的反向扩散步骤生成策略,以更好地拟合多峰行为策略。然后,提出利用优势函数对策略提升进行克隆指导,以帮助智能体更加专注于数量稀少的高回报轨迹。最后针对连续控制任务和稀疏奖励导航任务分别构建了两种优势函数。在bandit任务和D4RL基准上的实验结果表明:所提方法有效缓解行为策略表达能力受限及高回报轨迹稀缺的问题,在大多数任务获得最高的归一化得分。
优先出版时间:2024-10-16 DOI: 10.13195/j.kzyjc.2024.0647
摘要:针对传统灰狼优化算法(GWO)在移动机器人路径规划任务中经常遭遇局部最优的困境,并且收敛效率不尽人意,故提出一种基于Piecewise混沌映射的改进灰狼优化算法(PGWO)。PGWO算法首先采用Piecewise混沌映射初始化灰狼规模,提高种群分布的多样性;其次将GWO算法中收敛因子a由线性调整为非线性控制参数,调整后的收敛因子a在早期迭代中迅速减少,提高全局搜索能力,避免陷入局部最优,同时在后期迭代中逐渐减少,增加局部搜索能力;最后将GWO算法中灰狼趋于猎物的位置更新公式采用基于步长欧氏距离的比例权重进行更新,以提高灰狼独立搜索能力。为验证改进后算法性能,本文选取6个标准测试函数对PGWO算法与GWO算法,以及2个不同改进后的灰狼算法进行对比实验,结果表明PGWO算法有较好的收敛性和稳定性。将PGWO算法应用于3种不同复杂度的栅格地图中进行全局路径规划仿真对比实验,结果表明PGWO算法相较于GWO算法在20×20,30×30,50×50的栅格地图中,最短路径分别缩短了22.09%,34.12%,47.75%。
优先出版时间:2024-10-15 DOI: 10.13195/j.kzyjc.2024.0493
摘要:针对无人机城市街景实时语义分割任务中轻量级算法缺乏全局信息交互导致像素类别错分的问题,提出了一种注意力置换与通道重建的无人机城市街景实时语义分割网络,网络采用编码-解码结构。在编码器中,利用轻量级的置换自注意力机制来构建注意力分支,提取全局上下文信息的同时保持较高的计算效率;利用分裂-变换-融合的策略设计了通道重建模块对注意力分支的输入进行融合压缩,减小无关特征带来的计算量和对分割结果的影响。在解码器阶段,利用空间权重加权构建空间特征融合模块,实现对有效特征最大程度上的利用;利用置换自注意力机制和非对称卷积构建全局信息感知模块来克服无人机航拍图像中复杂背景的干扰。实验结果表明所提模型在UAVid验证集上平均交并比达到72.3%,相较于UNetFormer提升了2.3%,分割速度达到每秒105.8帧。在保证模型分割速度的前提下,取得了较好的分割精度。
优先出版时间:2024-10-14 DOI: 10.13195/j.kzyjc.2024.0657
摘要:本文研究了连续多智能体系统的分布式最优一致性问题, 即通过智能体之间的信息交互协同寻找全局成本函数的最小点, 其中全局成本函数}由各智能体的局部成本函数求和所得. 基于零梯度和方法与固定时间机制, 本文提出了一种新型分布式非线性一致性策略, 实现了智能体在固定时间的最优一致性. 其次, 本文所提算法利用滑模技术实现了智能体初始状态自由. 并证明出所提算法收敛上界是某正弦函数的零点, 与初始状态无关. 最后, 通过三组案例仿真验证了所设计算法的有效性.
优先出版时间:2024-10-14 DOI: 10.13195/j.kzyjc.2024.0437
摘要:随着个性化无线通讯的增长,蜂窝连接无人机逐渐成为快速构建无线通信网络的重要手段。由于城区复杂环境对无线通讯的影响,无人机如何获得最佳的飞行路径面临巨大的挑战。现有方法在评估无人机路径的通信性能时通常依赖于飞行高度固定的二维视距(Line of Sight, LOS)概率模型。本文考虑无人机可以通过调节飞行高度以改善通讯质量,提出三维视距概率模型,从而构建信号干扰噪声比(Signal to Interference plus Noise Ratio, SINR)的三维地图,并基于通讯质量阈值判别,获得二值化3D-SINR地图。然后,基于该地图,以无线通讯连接中断率、连接中断持续时间、服务基站切换次数为通信质量评估指标,建立无人机三维路径规划模型。最后,采用改进的启发式方法求解无人机飞行路径。仿真实验展示了城区通信场景下生成三维SINR地图的良好效果。基于该地图求得的无人机飞行路径与现有方法相比,拥有更好的通讯连接质量和更小的路径长度。
优先出版时间:2024-10-12 DOI: 10.13195/j.kzyjc.2024.0282
摘要:针对小到个体、组织大至地区、国家等复杂系统的未来发展进行的综合预判问题,本文基于综合评价并结合被评价对象(系统)的历史发展对其未来进行多指标预测分析,从而为其未来发展的综合预判提供数据支撑。由于被评价对象的未来发展往往充满了一定的不确定性,具体研究中将被评价对象的未来发展预期分为“超乐观”、“乐观”、“平均”、“悲观”和“超悲观”五种情境,以此为基础分情境预测未来短期内被评价对象的发展空间,并构建相应的预测性评价方法。在对指标进行赋权时,从有利于系统未来整体发展的视角提出了一种指标权重设计方法。在预测性评价结论方面,考虑到未来发展的不确定性特征,将随机聚合方法融合到预测模型的求解中,采用带有概率特征的相对优劣排序方式描述被评价对象未来可能的发展水平。最后,将该方法应用至组织中层管理人员未来发展潜力预测性评价中,通过与已有方法的对比分析说明了本文方法特征的同时,验证了本文方法的有效性。该研究可为复杂系统未来发展的综合预判问题提供方法支撑,研究结论可为系统规划及资源分配提供基于历史数据支撑的有效参考。
优先出版时间:2024-10-12 DOI: 10.13195/j.kzyjc.2024.0326
摘要:研究了一类具有未知初始跟踪条件的非线性系统预设性能最优安全跟踪控制问题.开发了一个基于可变障碍函数的性能约束控制设计的新方法.针对系统实际输出约束突变到突然解除而引起的系统跟踪的安全问题,提出一个新的安全边界自调整规律,进一步更新了已有的安全边界保护方法.同时,采用演员-评论家结构的强化学习算法来优化系统的控制输入.基于此,设计了系统带预设性能约束的安全跟踪控制器.该控制器可以保证在初始跟踪条件未知的情况下系统的安全跟踪控制和预设有限时间控制性能,并解决了输出约束突变解除之后的输出快速跟踪原期望轨迹的问题.最后,仿真验证了该方法的有效性.
优先出版时间:2024-10-12 DOI: 10.13195/j.kzyjc.2024.0836
摘要:针对一类多列车系统, 提出了一种具有牵引力/制动力约束以及追尾防护功能的分布式无模型自适应PID(MFAPID)控制方案. 首先, 通过动态线性化方法将列车的动力学模型转化为等价的动态线性化数据模型. 其次, 利用I/O数据设计了一种带有牵引力/制动力约束和追尾防护功能的分布式MFAPID控制算法. 最后, 给出了该算法的收敛性分析和仿真验证.
优先出版时间:2024-10-12 DOI: 10.13195/j.kzyjc.2024.0855
摘要:针对油井示功图特征提取效果不佳导致工况诊断准确率不高的问题,提出了一种基于多分支融合嵌入式注意力特征提取的油井工况诊断方法。首先,为使提取的示功图隐含特征信息更加全面,在卷积自编码器的基础上,设计多分支、多尺度的编码器结构提取并融合示功图位移-载荷数据的特征信息。其次,为强化多分支融合后的局部特征,设计一种嵌入式通道注意力机制,在全局平均池化基础上,添加全局最大池化,使其能够同时关注示功图全局和局部特征;同时为进一步增强示功图关键信息的隐含特征提取能力,在通道挤压后,激励之前嵌入通道注意力机制模块,对挤压后的通道预先进行一次权重调整,激励后进行权重的二次调整。最后,将提取的特征放入长短期记忆网络模型中进行油井工况诊断。结果表明,基于多分支融合嵌入式注意力特征提取的油井工况诊断方法在一定程度改善了示功图有效特征提取能力,提高油井工况诊断率,能够满足油田现场的实际需求。
优先出版时间:2024-10-12 DOI: 10.13195/j.kzyjc.2024.0843
摘要:随着工业自动化和智能化的发展,利用机器学习技术对高炉故障进行诊断变得越来越重要. 决策树模型 因其直观、易于解释的特点,在故障诊断领域得到了广泛应用,但对于炼铁过程中存在高维度、非线性和强耦 合的特点,传统决策树模型的构建容易陷入局部最优解,效率较低且复杂度较高. 针对这些问题,本文首先引入 迹距离函数,并证明了在迹距离函数中任何局部最优解也是全局最优解的性质,接着针对决策树的节点分裂过 程,提出了一种基于迹距离划分的决策树模型,记作 TraceTree. 此模型一方面更快速地评价一个节点的划分效 果,有效降低决策树模型的复杂度. 另一方面能识别出对故障诊断最有贡献的特征参数并获得更高的诊断精度. 最后,与其他改进模型的对比实验结果表明,该模型在更短的训练时间内能取得最优的高炉故障诊断效果,及 时地对高炉炉况进行监测与诊断.
优先出版时间:2024-10-11 DOI: 10.13195/j.kzyjc.2024.0664
摘要:为了减少机器人在探索过程中容易忽视局部狭小区域,路径重复度高,探索效率低下的问题,提出一种基于分层边界与可视图的自主探索算法。首先,根据三维地图中状态变化的体素,实时提取局部边界并增量构建全局边界,对边界聚类得到候选目标点;其次,基于增量更新的可视图对候选目标点进行综合指标的评价,采用一种指数衰减形式的评估函数;再次,将可视图与D*Lite算法结合,基于动态规划的思想,引导机器人快速的完成对未知环境的探索,避免重复路径。最后,在不同环境下进行仿真实验,数据证明本文方法在移动距离、运行时间、探索效率方面都优于NBVP、GBP2和DSVP算法。结果表明,该算法可以有效解决机器人在探索时忽视局部狭小区域、路径重复度高的问题,提高了机器人自主探索的效率。
优先出版时间:2024-10-11 DOI: 10.13195/j.kzyjc.2024.0679
摘要:针对未知异构非线性多智能体系统一致性跟踪问题,设计了基于控制器动态线性化的分布式直接型无模型自适应PID控制算法,仅使用被控系统的输入输出数据以及智能体间的拓扑结构关系进行控制器参数整定,不受被控系统数学模型的限制. 首先利用动态线性化技术将受控系统以及理想控制器等效转换成相应的动态数据模型,基于理想控制器的动态数据模型设计了控制器结构以及参数自适应更新算法. 然后利用压缩映射以及盖尔圆盘定理进行了误差收敛分析. 最后进行了大量仿真对比,验证了所设计控制算法的有效性和优越性.
优先出版时间:2024-10-09 DOI: 10.13195/j.kzyjc.2024.0953
摘要:预成端盒是一种连接和管理光纤网络物理分布的重要光传输设备,现阶段对该类设备的巡检主要依赖人工完成。为了降本增效,亟需上线智能化巡检方式。然而,受制于设备部署场景复杂的光照条件、多样的端口连纤状态及遮挡问题,利用现有的图像识别技术对端口信息(端口连纤状态和连纤条码信息)进行自动化识别具有极大的难度:既难以保证端口信息识别的精度,又难以将识别结果与其实际物理位置相匹配。为此,本文提出了基于空间匹配校准的预成端盒端口信息自动化识别方法,包括:(1)基于空间多尺度匹配和多角度补偿的端口状态识别和校准方法,采用多尺度模板校准算法自适应地匹配端口实例的状态信息及其物理位置,并设计多角度补偿方案完成端口的校准识别。(2)基于自适应矫正与动态极小值匹配的光纤尾端条码信息识别方法,自动检测条码成像姿态并有效切割和识别条码,利用动态极小值匹配算法进行空间匹配校准,实现连纤端口的条码信息识别。本文构建了一个真实数据集,并基于此进行了大量实验,实验表明本文提出的方法在端口信息的识别精度和效率上均优于同类应用场景;同时,本方案在移动设备上进行了部署测试,实现了准确高效的预成端盒端口信息自动化识别。
优先出版时间:2024-10-08 DOI: 10.13195/j.kzyjc.2024.0755
摘要:针对现有时间序列聚类分析较少考虑到各簇时间序列的相似形态对聚类结果的影响, 本文提出一种基于时间序列形态的模糊聚类算法. 该算法使用线性时间复杂度的 Jeffreys 复合距离度量时间序列之间的距离, 利用迭代过程中的隶属度为各簇择选能够映射簇内时间序列相似形态的核心特征, 并在下一次迭代中对距离进行特征加权. 当隶属度不再显著变化时, 算法停止迭代, 最后根据隶属度最大原则对时间序列进行簇划分. 在 14 个公开时间序列数据集上与 10 种对比算法的实验结果表明, 该算法具有精确的聚类结果和较好的鲁棒性, 综合性能优于对比算法.
优先出版时间:2024-09-30 DOI: 10.13195/j.kzyjc.2024.0470
摘要:针对连续搅拌反应釜系统的浓度和温度的跟踪控制问题,本文提出基于Koopman算子的模型预测控制方法. 基于Koopman算子建立CSTR的有限高维线性模型(24维).以CSTR的高维线性Koopman模型作为预测模型,结合预测控制滚动时域多目标优化,考虑状态约束、控制目标、性能优化等约束条件,设计连续搅拌反应釜系统的温度和浓度跟踪控制算法.利用Matlab/Simulink仿真实验验证本文所提方法的有效性.通过与CSTR的局部线性化模型预测控制算法(LMPC)和非线性模型预测控制算法(NMPC)进行仿真对比验证本文所提方法的优越性.实验结果表明,本文方法无需依赖系统的精确数学模型,能避免求解非凸优化问题,而且收敛速度更快,控制精度更高.
优先出版时间:2024-09-27 DOI: 10.13195/j.kzyjc.2024.0563
摘要:为解决多响应建模中样本点选取问题,支撑高效准确地建立多个代理模型,提出了一种基于贝叶斯支持向量机的修正多响应期望改进(Multi-response modified expected improvement for global fit, MR-MEIGF)采样准则。首先,通过贝叶斯支持向量机模型计算候选点的梯度,构建邻域,得到基于邻域梯度投影的局部开发准则。模型得到的样本点预测方差作为全局探索准则,两者结合得到单个响应的混合采样准则。而后通过局部指标,量化每个响应的重要度,进一步得到兼顾多个响应模型精度的MR-MEIGF采样准则,从而实现多个响应的综合优化。依据MR-MEIGF准则在候选池中选择新添加样本点。使用3个2维算例及3个6维算例分别组合成多响应问题,与序贯空间填充方法,一次性空间填充方法以及其他多响应自适应采样方法进行对比,验证了所提采样方法的有效性,并在6维算例上将贝叶斯支持向量机模型与Kriging模型进行性能比较。
优先出版时间:2024-09-24 DOI: 10.13195/j.kzyjc.2024.0266
摘要:电潜泵故障诊断对于确保安全可靠采油至关重要,但电潜泵数据呈现出的多变量、非线性和动态变化等复杂特性为该任务带来了严峻挑战。近年来,深度学习在复杂数据特征提取方面表现出的强大能力催生了一系列基于神经网络的电潜泵故障诊断方法。然而,多数方法忽略了电潜泵数据的动态特性及长时依赖特征提取困难的问题。针对上述问题,提出一种多变量时序标记Transformer神经网络实现电潜泵故障诊断。该模型设计了新的多变量时间序列标记策略,继承了引入多头注意力机制和残差连接的传统Transformer神经网络编码器在长时依赖特征提取方面的优势,用前向神经网络替代了传统Transformer神经网络解码器以简化模型复杂度。通过对油田现场故障数据分析,验证了该方法的有效性。实验结果表明,所提方法实现了10类电潜泵故障的精确诊断,相比流行的深度学习方法诊断性能更优。
优先出版时间:2024-09-23 DOI: 10.13195/j.kzyjc.2024.0476
摘要:针对飞机全电刹车系统普遍存在的匹配和非匹配扰动会降低滑移率和制动压力跟踪精度, 难以实现对飞 机刹车的高性能控制的问题,提出了一种基于级联扩张状态观测器和有限时间预设性能反演的飞机全电刹车系 统改进滑模复合控制方法. 首先, 考虑匹配和非匹配扰动建立了飞机全电刹车系统的优化数学模型, 设计了级联 扩张状态观测器对匹配和非匹配扰动进行实时估计?其次, 基于扰动估计和有限时间预设性能反演设计了滑模控 制方法, 使滑移率可以在预设时间内精确跟踪期望值? 再次, 基于扰动估计设计了改进非奇异全局终端滑模控制 方法, 制动压力可以精确跟踪参考虚拟制动压力, 使飞机全电刹车系统快速获得最大的制动压力, 提高了制动性 能.通过在不同跑道状态下进行的对比仿真分析,验证了所提出的飞机刹车复合控制方法可以有效地提高刹车效 率.
优先出版时间:2024-09-23 DOI: 10.13195/j.kzyjc.2024.0472
摘要:传统轻量级图像超分辨重建方法通常仅依赖单一尺度的卷积来提取图像特征,简单地将浅层和深层特征聚合后进行图像重建.然而,这种做法忽略了感受野信息的丰富性以及中间潜在特征在图像重建中的重要作用,导致卷积层间的信息交互受限,进而造成图像细节信息丢失和重建精度不高的问题.鉴于此,本文提出了一种基于渐进式感受野的轻量级图像超分辨重建方法.该方法的核心在于设计了一种阶梯式的上下双路卷积链,通过逐步调整感受野的大小,有效地融合了图像的整体结构信息和局部细节特征,从而实现了信息的多样化表达.此外,还探索了一种多维潜在特征的融合方法,旨在充分挖掘多维潜在特征间的相关性.实验结果表明,与目前流行的重建方法相比,本文提出的方法在捕捉图像细节方面表现出色.特别是在缩放因子为4的情况下,与NGSwin相比,本文方法所需的参数量更低,且在Urban100测试集上,PSNR和SSIM分别提高了0.09dB和0.0027,这进一步验证了所提方法的优越性.
优先出版时间:2024-09-19 DOI: 10.13195/j.kzyjc.2024.0739
摘要:由于存储空间限制,物联网中的边缘设备往往仅能保留当前某个有限时段内的数据。实际生产过程中,设备工况在一定时间内发生变动,往往产生新类别的故障数据或图像,这种类别增量会造成模型在本地训练时产生灾难性遗忘。在单边端类别增量的局部灾难性遗忘基础上,随着云边协同优化,灾难性遗忘会产生扩散。针对上述问题,提出一种基于稳定特征原型的联邦类别增量学习方法,在边端建立类别样本记忆库存储类别代表性样本,设计了基于回放范式的特征网络更新策略,在云端设计了以统一特征空间下的特征原型为参考基准的加权聚合策略,在联邦框架下稳定优化特征空间,实现类别知识的联邦更新。基于类别增量常用的数据集CIFAR10和Mini-ImageNet的实验证明了所提方法可以有效缓解灾难性遗忘。
优先出版时间:2024-09-18 DOI: 10.13195/j.kzyjc.2024.0565
摘要:针对协同利用多频率信息进行建模时存在变量频率不齐,以及高频变量通常具有季节性影响的问题,本文构建了季节性混频灰色预测模型(SMFGM(1,N))。新模型通过引入Nakagami函数实现变量间频率对齐,基于季节因子消除变量的季节性影响,添加非线性项反映系统受时间因素的非线性影响。此外,为辨识新模型中滞后参数,将Nakagami函数与灰色关联度模型结合,提出了混频灰色关联度模型,以识别不同频率变量间的关联关系。最后,基于年度GDP与季度税收收入案例,将新模型与混频数据抽样模型、其他灰色预测模型、神经网络模型和统计模型进行对比分析。结果表明SMFGM(1,N)模型具有更优异的建模性能,能够有效处理具有季节性规律的混频数据预测问题,为多频率信息系统建模提供了新的方法。
优先出版时间:2024-09-15 DOI: 10.13195/j.kzyjc.2024.0238
摘要:共享经济的兴起推动了共享出行行业的迅速发展,顺风车合乘成为移动出行的新趋势。顺风车合乘中考虑司乘的服务模式偏好有助于满足多元化的消费需求。为实现针对服务模式偏好下顺风车合乘的司乘匹配问题,提出了一种新的匹配方法。首先,针对服务模式偏好下顺风车合乘的司乘匹配问题进行了描述;根据时间窗和最大绕路距离,计算乘客和司机的满意度;随后,构建了以匹配数量最大、司机平均满意度最大、乘客平均满意度最大为目标的多目标优化模型;针对模型的NP难特性,基于带精英策略的非支配排序遗传算法设计了求解该模型的启发式算法;最后,通过算例说明了所提方法的可行性与有效性。结果表明,所提出的方法能够有效求解服务模式偏好下顺风车合乘的司乘匹配问题,初始种群生成策略和局部搜索操作能一定程度上增强算法的全局搜索能力。
优先出版时间:2024-09-14 DOI: 10.13195/j.kzyjc.2024.0567
摘要:当前,基于检测的多目标跟踪算法在处理复杂场景中的漏检和 ID 切换等问题时展现了卓越的性能.然而,面对复杂场景中运动目标检测阶段的性能限制,这些算法仍有待提升.为应对此挑战,本文引入了一种全新的卷积混合注意力机制.该机制通过混合注意力模型加强对高动态场景中稀疏空间形变和上下文信息的关注,实现对不同尺度特征形变的动态加权.进一步地,本文提出了一种两阶段多目标跟踪方法——CHAMTrack,通过在运动目标检测阶段通过使用该注意力机制,可增强算法在复杂多目标跟踪场景中对关键信息的捕捉能力,显著改善同一场景中不同尺度目标的跟踪效果.为验证所提方法的有效性,本文分别在MOT17和MOT20数据集上进行测试,通过对结果分析表明CHAMTrack在关键性能指标MOTA和IDSw.上均显著提升.通过消融实验,进一步证明了其在复杂场景下多目标跟踪领域的应用价值.
优先出版时间:2024-09-13 DOI: 10.13195/j.kzyjc.2024.0586
摘要:视线估计是一种预测人眼注视位置或注视方向的技术,在人机交互和计算机视觉的应用中发挥重要作用.针对特征的差异性和利用率不全面的问题,本文提出了双分支特征融合的视线估计算法.首先,构建Agent Swin Transformer网络与残差网络结合的双分支网络模型,对视线特征进行提取,由改进的Agent Swin Transformer网络构成全局特征提取分支,逐层提取全局语义特征,由残差网络构成局部特征提取分支,提取不同尺度下的局部细节特征.通过特征融合将特征张量连接在一起,增强模型的表征能力;其次,Agent Swin Transformer网络融合EMA模块和SCConv模块,以加强特征,保持信息有效性,降低复杂性和计算成本;最后,结合头部姿态估计进行视线估计得到最终的视线方向,以减少干扰因素对眼部外观的影响.在MPIIFaceGaze数据集上进行大量实验,实验结果表明,该方法的视线估计角度平均误差为4.23°,同当前主流的同类方法相比,所提出算法能够更为准确地进行视线估计.
优先出版时间:2024-09-13 DOI: 10.13195/j.kzyjc.2024.0805
摘要:针对具有全状态非对称时变约束的不确定严反馈系统控制问题,本文首次提出了一种具有双层约束结构的低复杂度预设时间跟踪控制方法。首先,采用约束转换函数直接对系统状态施加约束条件,将状态约束问题转换为无约束状态的调节问题,消除了可行性条件。其次,结合预设时间性能函数,提出一种新的坐标变换方法,对变换后的状态和跟踪误差进行重构,从而完成了双层约束结构,内层约束用以处理系统约束状态,外层约束用以设计虚拟控制和实际控制信号,有效解决了当系统状态接近约束边界时中产生的奇异性问题。最后,通过仿真结果验证了所提方案的有效性。
优先出版时间:2024-09-09 DOI: 10.13195/j.kzyjc.2024.0327
摘要:伴随线上医疗不断发展,医院面临线上线下联合医疗服务的模式中,对线上服务医生进行排班优化决策的问题。问题主要挑战在于时变的患者需求和线上医疗特殊的服务模式。针对线上医疗服务系统的医生排班决策问题,将线上医疗服务系统建模为资源共享队列,并采用时变马尔可夫链和均匀化方法对患者逗留时间、队列长度和医生加班时间进行建模和分析评估。基于以上系统评估的方法,提出了变邻域搜索的启发式算法对医生排班问题进行求解。基于合作医院的实际数据开展数值实验分析,验证了基于时变马尔可夫链建模的准确性,证明了所提出算法可以得到相对医院实际方案更好的排班结果,从而可以更加合理安排医生的工作时间,减少病人的逗留时间,控制系统中的病人数量,并具有优良的鲁棒性。研究对完善我国线上医疗服务系统的运作管理具有实际意义。
优先出版时间:2024-09-09 DOI: 10.13195/j.kzyjc.2024.0180
摘要:作为可再生能源装机的重要组成部分,海上光伏发电系统受制于特殊的气象环境和有限的远海气象监测条件,相比于陆地光伏预测,海上光伏预测需要精确掌握海域上空多变的云层状况并分析海洋气象波动特征。因此,本文提出一种基于卫星遥感数据的超短期功率预测方法。针对云层图像的不确定性和波动问题,采用遥感图像全波段的分段加权高斯融合与基于VAE的重构技术,提出了基于多光谱云图修正的海上功率模型,并使用双层GAN网络预测海上光伏出力,显著降低了预测误差。通过新加坡柔佛海峡电站数据验证,结果表明该模型能够高精度实现1小时及以上的超短期功率预测,精度较传统方法提高12%,增强了电网实时调度的可靠性和可再生能源并网消纳能力。
优先出版时间:2024-09-07 DOI: 10.13195/j.kzyjc.2024.0205
摘要:针对传统RGBT目标跟踪算法网络精确度低,鲁棒性差,以及在目标尺度变化大和长时跟踪过程中存在目标丢失无法找回等问题,提出一种新的基于自适应特征融合机制的可修正RGBT目标跟踪算法(Siamese Meta- Storage Tracker)。首先,引入一种特征层与模态间双自适应融合机制(Adaptive dual-modal fusion module),充分利用两模态间的互补信息,增强RGB与红外特征的跨模态融合;其次,设计一种后端时序约束回归模块(Timing Constraints module),利用上一帧信息对 IOU 计算及边界框回归进行约束,有效减少相似物干扰;最后,提出一种基于元学习的在线模板更新机制(Meta- Storage),对回归阶段得分较高的模板图像进行更新存储,解决长时跟踪中累计误差和目标难以找回问题。采用权威的目标跟踪数据集GTOT, RGBT234和VOT-RGBT2019进行算法验证,本文所提方法均可以取得极具竞争力的结果,将算法移植到嵌入式设备Jetson Xavier NX 上进行性能测试,结果表明本文算法运行速度达到29帧/s,相比当前流行的多种RGBT算法,具有更为全面的跟踪性能,且能有效解决相似物干扰、目标丢失难找回等问题。
优先出版时间:2024-09-07 DOI: 10.13195/j.kzyjc.2024.0304
摘要:自重构是促进移动机器人能力升级与涌现的重要手段,但面向工程开放场景存在定位基准与感知特性差异、环境障碍威胁、感知范围约束和嵌套运动饱和等应用性挑战.本文基于组合任务分解与不同基准感知特性,提出惯性系定位下远距集结和载体系感知下近距对接的分段式通用控制框架.在远距范围,设计分层安全约束机制和自适应抗饱和策略,实现移动机器人在障碍环境中的平滑、安全集结.在近距阶段,引入基于安全视线的轨迹修正策略与复合非线性收敛控制形式,确保移动机器人在视线范围内快速、平稳完成与待对接目标的锁紧组合.最后,通过物理实验验证所提出方案的有效性和可行性,方法通用成果也为无人系统充电、水下运载器回收等工程对接场景提供了新的解决思路.
优先出版时间:2024-09-06 DOI: 10.13195/j.kzyjc.2024.0660
摘要:对任意切换拓扑下含未知干扰的二阶多智能体系统, 基于反步法提出了一种新的混合事件触发固定时间一致性控制方法. 首先, 提出一种结合动态事件触发条件和静态事件触发条件的新型混合事件触发机制, 该机制在系统瞬态响应阶段, 基于辅助变量的幂次项设计新的动态事件触发条件, 可以根据智能体的测量误差和速度误差的变化而自适应地动态调整触发阈值, 从而自组织地减少了事件触发次数; 在系统稳态响应阶段, 采用静态事件触发条件, 基于适当固定阈值能够减少该阶段不必要的触发次数, 有效克服动态变量稳定后触发阈值太小的问题. 其次, 根据多共同Lyapunov函数分两阶段证明了所提方法和给出的一致性充分条件能够保证二阶多智能体系统在任意切换拓扑下实现实际固定时间一致性. 然后, 通过设计含双曲正切函数的测量误差的可导性证明了系统排除Zeno行为. 最后数字仿真结果验证了所提控制方法的有效性和优越性.
优先出版时间:2024-09-06 DOI: 10.13195/j.kzyjc.2024.0478
摘要:针对智能网联车辆在通信受限环境下遇到的通信延迟、资源受限、未知输入及非理想通信拓扑等问题, 提出了一种基于观测器的协同编队控制策略. 首先, 根据四元素模型对车辆队列系统进行动力学建模; 其次, 为解决系统部分状态不可测、未知输入与可测噪声等问题设计了积分观测器, 依此设计协同编队控制策略; 然后, 构建误差系统并引入H∞性能指标, 构造Lyapunov-Krasovskii泛函处理变化时延, 将基于观测器的编队控制问题转化为误差系统稳定性问题,并推导出稳定充分条件. 仿真结果验证了所提方法的正确性与有效性.
优先出版时间:2024-09-06 DOI: 10.13195/j.kzyjc.2024.0410
摘要:本文研究了有向不平衡通信拓扑下智能电网的经济调度问题, 提出了一种新颖的分布式优化算法. 其目的是通过有效调度发电机组的输出功率, 以最大限度地降低系统总发电成本. 该算法通过引入动量项, 确保发电机能够从其自身和邻居处获取更多先前的历史信息, 从而在更短的时间内实现收敛. 算法中动量项和步长是时变的, 因此算法的执行效率更高. 为了避免智能体间的连续通信, 算法考虑了一种新的事件触发条件, 其关键参数选择简单, 且智能体只在触发时刻向其邻居传输信息. 基于成本函数的假设 (平滑性和强凸性), 理论分析证明了当最大步长和最大动量项系数在其限制范围内时, 该方法可以实现最优调度. 最后通过数值实例进一步验证了算法的优越性和正确性.
优先出版时间:2024-09-06 DOI: 10.13195/j.kzyjc.2024.0694
摘要:供应链是一个极其重要而又复杂的系统, 它与社会系统和管理系统有着广泛的联系. 由于供应链系统具有一段时间内需求突增或骤减的非瞬时脉冲特点, 使得其对各种不确定性和外部干扰都很敏感, 并产生混沌行为. 因此, 本文建立了具有非瞬时脉冲的供应链模型, 分别分析了非瞬时脉冲对稳定和混沌供应链系统的影响, 并给出了有限时间稳定策略, 同时讨论了零售量和生产量对分销量的联合效应对该模型的影响. 另外, 同步控制是降低不确定性和扰动对供应链负面影响的重要方法, 本文还讨论了两个具有相同结构的供应链系统的非瞬时脉冲同步行为, 并给出了相应的有限时间同步策略. 最后, 通过数值算例验证了所得结果的有效性. 研究发现: 非瞬时脉冲对供应链系统有着显著影响, 但只要选取恰当的非瞬时脉冲时间间隔和强度, 可以实现供应链系统的有限时间稳定和同步控制.
优先出版时间:2024-09-06 DOI: 10.13195/j.kzyjc.2024.0798
摘要:本文研究在(p,N)-策略控制下耐烦服务员不中断多重休假M/G/1排队系统,其中每当系统变空时,服务员就去进行一次不中断的休假,当服务员休假回来时,如果系统中等待服务的顾客数大于等于事先设置的正整数阈值N(N≥1)时,则服务员立即开始服务直到系统再次空竭,若系统中有顾客但顾客数少于N个,则服务员以概率p(0≤p≤1)开始服务,以概率(1-p)不服务处于通常的闲期直到系统中的顾客数累积到N个时才服务.通过系统稳态队长的随机分解定理得到系统稳态队长分布的概率母函数和平均队长表达式,同时应用Little公式得到任意顾客的平均等待时间表达式.最后建立系统的费用结构模型,利用更新报酬定理推得系统长期运行单位时间的期望成本费用函数.进一步,在没有平均等待时间和有平均等待时间约束下,通过数值实例分别讨论了系统的优化控制问题,并确定了使得系统费用最小的一维最优控制策略N*和当休假时间为T时的二维最优控制策略(N*,T*).
优先出版时间:2024-09-03 DOI: 10.13195/j.kzyjc.2024.0543
摘要:本文基于领导者 -跟随者框架研究了结构平衡和聚类平衡网络的可牧性. 首先, 通过分析网络的拓扑结构, 依据边界节点的距离划分提出了一种节点分组方法. 在此基础上, 分别分析了结构平衡和聚类平衡网络的拓扑结构、符号特征、动力学特性与能控性矩阵之间的关系, 给出了一些领导者选择方法以确保网络的可牧性. 进一步, 针对结构平衡网络, 给出了一种具有多项式时间复杂度的领导者搜索算法. 该算法避免了现有方法中复杂度随着节点数目呈指数式增长的问题, 并为实现网络可牧的最小数目的领导者选择提供了帮助. 此外, 研究了一类特殊的聚类平衡网络 (星聚类平衡网络), 得到了两种领导者选择方法实现网络的可牧性. 最后, 通过数值例子验证了所得理论结果的有效性.
优先出版时间:2024-09-03 DOI: 10.13195/j.kzyjc.2024.0534
摘要:超精密运动台是光刻机的关键组成部分, 包括工件台和掩模台, 二者的同步性能直接影响光刻机的套刻精度和关键尺寸均匀性. 针对工件台和掩模台的同步控制问题, 本文提出了一种基于同步性能综合指标的迭代学习控制 (MASD-ILC), 能够减小同步误差, 且有效抑制推力扰动. 证明了所提方法的学习律沿时间轴和迭代轴的收敛性并给出收敛条件, 分析了学习增益和权重系数对学习律收敛性的影响, 仿真验证了所提出方法的有效性.与传统基于误差的迭代控制 (e-ILC) 相比, 本文所提的 MASD-ILC 收敛速度更快, 收敛误差更小, 鲁棒性更好. 基于 MASD-ILC 的系统经过迭代学习, 同步性能综合指标从 31.56nm 降低到 0.10nm; 存在推力扰动和模型不确定时, MASD-ILC 的收敛速度和收敛误差不受影响.
优先出版时间:2024-09-02 DOI: 10.13195/j.kzyjc.2024.0517
摘要:研制进度管理是复杂装备项目的重要工作之一,合理的进度计划和调控措施能够保证项目研制成功和及时交付。然而研制进度受到工期、成本、客户需求等众多因素的影响和制约,并且这些因素呈现一定的不确定性。为描述和解决此类进度控制问题,考虑到工期、成本等变量的不确定性和客户质量需求的满足程度,利用区间数、随机网络(GERT)、优化模型等理论和方法,构建了基于多变量随机网络的复杂装备研制进度控制方法。首先,考虑到工期、成本、质量价值等变量的不确定性,将区间数引入随机网络(GERT),同时考虑客户质量价值需求,定义了基于区间数的多变量随机网络,分析了复杂装备质量价值与产品质量水平和研制成本之间的关系,并提出了质量价值的量化公式;其次,考虑到工期、成本和质量价值的相互影响和作用,构建了复杂装备研制工期-成本-质量价值多目标优化模型,并利用多目标遗传算法(NSGA-II)设计求解算法;最后,以案例验证了模型的有效性与合理性。
优先出版时间:2024-09-01 DOI: 10.13195/j.kzyjc.2024.0713
摘要:高精度的缺陷检测和组件检测对确保管道的安全运行是至关重要的. 针对现有检测方法存在的精度低和泛化性差的难题, 本文提出一种基于异构扩散模型的新型管道缺陷和组件检测方法. 首先, 原始的漏磁信号被预处理来降低信号采集中噪声等负面因素的影响. 其次, 针对特征提取困难的问题, 本文设计了一种基于稀疏注意力模块的特征提取方法, 它通过稀疏化的方式建立了漏磁信号间的长距离依赖关系进而实现了模型对缺陷和组件的信息聚焦. 此外, 将传统的特征金字塔网络替换为路径聚合特征金字塔网络, 这充分确保了多尺度特征的完备性. 最后, 本文设计了一种基于异构扩散模型的检测机制, 它将候选框回归过程转换为随机框的去噪过程, 这减少了模型对预先设定的锚窗的依赖, 进而提升了模型的泛化性和准确性. 基于实际管道对其有效性进行了验证, 实验结果表明, 本文方法的平均检测精度达到97.4%, 优于最先进的对比方法3.5%, 这确保了其在实际应用中的前景.
优先出版时间:2024-09-01 DOI: 10.13195/j.kzyjc.2024.0279
摘要:本文针对切换通讯拓扑环境下,高阶线性多智能体系统在状态不可测时的二部编队控制问题进行研究。首先,构造了全维状态观测器对状态完全不可测系统进行状态观测。然后基于状态观测器对多智能体系统进行分布式控制器的设计,将线性积理论与分布式控制结合对系统进行重构。文中应用图论、矩阵分析和Lyapunov等相关知识对重构系统进行稳定性分析,给出了重构系统在切换通讯拓扑环境下最终实现二部编队时,连通图平均驻留时间所满足的条件。此外,在对抗网络环境下,给出了系统状态未知时可行时变编队满足的条件。并在控制器中引入了二部编队补偿函数,提高了系统能够组成的二部编队队形数量,具有实际应用意义。最后,通过数值仿真验证了所提方法的有效性。
优先出版时间:2024-09-01 DOI: 10.13195/j.kzyjc.2024.0202
摘要:针对带柔性时间窗的绿色两级多周期车辆路径问题 (G2E-MPVRPFTW), 建立同时以最小化碳排放量和最大化客户满意度为目标的数学模型, 提出一种结合 K-means 带时间窗聚类 (KCTW) 的超启发蚁群优化算法(HHACOA) 进行求解. 首先, 根据 G2E-MPVRPFTW 大规模、多约束、强耦合的复杂特性, 采用 KCTW 将该问题分解为多个子问题, 以降低问题的求解复杂度. 其次, 使用 HHACOA 求解分解后的各子问题, 并把这些子问题的解合并便可获得原问题 G2E-MPVRPFTW 的解. HHACOA 在高层策略域生成 9 种邻域操作的不同排列, 且采用蚁群优化算法 (ACOA) 对优质排列信息进行学习, 并基于重构的转移概率矩阵生成新的排列, 以有效引导搜索到达优质解集中的区域;HHACOA 在低层问题域利用启发式规则和随机方法生成初始种群, 并将高层产生的每个排列作为一种算法, 作用于种群中的每个个体, 以实现在解空间更多不同区域进行搜索.
优先出版时间:2024-09-01 DOI: 10.13195/j.kzyjc.2024.0164
摘要:针对具有强非线性动力学特性的海洋浮体路径跟踪问题, 提出了基于改进Koopman算子在线预估器的模型预测控制(MPC)算法. 在算子可观测函数中引入状态时延变量与状态导数, 将浮体动态系统提升到希尔伯特空间, 使其高维线性化模型包含更多系统模态. 据此提出基于Koopman 算子的线性预估器, 它是数据驱动的状态提升非线性变换. 然后, 根据扩展动态模式分解得到的线性模型作为MPC控制器的内模, 此方式设计的MPC优化问题与一般线性动态系统的MPC优化问题具有相同的计算复杂度. 更重要的是, 浮体动力学特性对状态和控制输入的线性不等式约束以及对状态的非线性约束均可以以线性方式施加. 同时在线预估器采用增量更新数据的方式降低计算时间以适应滚动优化的要求. 本算法应用于海洋浮体的路径跟踪控制, 大量的仿真实验验证了该方法的有效性.
优先出版时间:2024-09-01 DOI: 10.13195/j.kzyjc.2024.0162
摘要:随着生活水平和消费水平的提高, 人们对冷链物流配送需求与日俱增. 同时, 现实中的冷链物流公司往往需要同时承担多个运输任务. 如何优化冷链物流配送路径, 在保证客户满意度和冷藏品新鲜度的同时, 降低多个配送任务各项成本, 是当前急需解决的问题. 本文首先构建包含车辆使用、油耗、碳排放、制冷、货损、时间窗惩罚成本, 以及客户满意度等约束的冷链物流配送模型; 然后将多因子优化(MFO)信息共享框架与共生生物搜索(SOS)算法相结合, 并引入位置变换策略促进不同任务之间共享有效路径信息, 提出基于位置变换策略的多任务共生生物搜索(PTMSOS)算法; 最后将其用于求解多个冷链物流配送问题. 仿真实验表明, PTMSOS算法不仅能同时加快多个冷链物流配送问题的收敛速度, 还能显著降低多个配送任务的各项成本.
优先出版时间:2024-09-01 DOI: 10.13195/j.kzyjc.2024.0360
摘要:卷积神经网络(CNN)在医学图像分析领域得到了广泛应用, 但受其固定感受野的局限性, 传统的CNN模型难以建立图像中的长距离依赖关系. Transformer通过自注意力机制能够建立图像全局视角下的信息依赖, 拥有更强的序列建模能力. 然而, Transformer难以捕获图像的局部细节特征. 为了解决上述问题, 提出一种基于CNN与Transformer的混合模型DC-TransNet, 用于医学图像分割. DC-TransNet采用双解码器结构建立图像局部和长距离依赖, 捕获局部和全局特征. 考虑到基于编码器-解码器结构的网络模型在不同深度提取到的特征图的大小不一致, 设计了两种特征感知注意力机制CFP和SFP, 合理分配局部和全局特征的权重. 在多个医学数据集上进行了实验, 结果表明DC-TransNet在2D医学图像单类别分割任务中取得了有竞争力的结果, mIoU与mDice等系数均得到显著提升.
优先出版时间:2024-08-31 DOI: 10.13195/j.kzyjc.2024.0362
摘要:为了克服传统数值方法在处理复杂优化问题时的局限性,提高找到全局最优解的效率,本文提出了一 种名为海狸算法(Beaver Algorithm,BA)的新型元启发式算法,用于解决全局优化问题。BA 根据海狸在修建 海狸坝时的伐木行为,将海狸分为质检狸、开发狸和采伐狸三种类型,以模拟其在伐木过程中的群体合作。开 发狸以随机方式搜索未知木材地,寻找新的木材资源;采伐狸则奔袭至质检狸处搜集木材,并在奔袭过程中寻 找木材资源;而质检狸引领海狸群体朝着木材资源最丰富的方向前进。BA 在 CEC2017 测试函数上进行了测试, 并与其他 7 种算法进行了比较。研究结果显示,BA 在大部分函数中获得最佳解,具有较强的优化能力。此外, 本文将 BA 应用于拉伸/压缩弹簧设计、三杆桁架设计等 2 个具有挑战性的工程问题,并与其他 2 种算法进行了 比较。结果表明,BA 在这些工程问题中均取得了最佳的优化结果,相较于其他 2 种算法表现更为出色。
优先出版时间:2024-08-31 DOI: 10.13195/j.kzyjc.2024.0295
摘要:针对一类耦合液位系统, 提出一种基于端口受控哈密顿系统模型的固定时间控制策略. 从物料平衡角度选择哈密顿函数, 构建耦合液位系统的端口受控哈密顿系统模型; 基于一种新型目标哈密顿函数, 结合匹配条件设计固定时间控制器, 使系统在固定时间收敛在稳定域; 提出一种目标结构矩阵参数整定方法, 以降低控制器求解过程的复杂度, 并给出目标矩阵参数与收敛时间之间的内在关联; 结合$L_{2}$增益干扰抑制理论, 设计全局固定时间$H_{\infty}$控制器. 所提控制方法能更好实现设定值跟踪, 具有较好的鲁棒性, 控制器更为简洁. 仿真结果验证了该控制策略的有效性.
优先出版时间:2024-08-31 DOI: 10.13195/j.kzyjc.2024.0328
摘要:碳交易政策的施行推动了供应链对于降碳生产、低碳宣传的长期关注。在此需求下,节能服务行业衍生出合同“双碳”服务模式。为分析该模式对上游制造商与下游零售商减排决策的影响,基于随机微分博弈理论构建了自主减排策略模型、外包合作减排策略模型和持股合作减排策略模型。研究发现:制造商是否采纳合同“双碳”服务主要取决于节能服务公司的减排成本优势,且与商誉衰减率、贴现率和消费者低碳偏好相关;在制造商选择合同“双碳”服务的情形下,零售商存在降低宣传力度并获取额外收益的可能;持股合作方式可以降低制造商对于合作减排的成本要求;制造商持有股份的提高可以增加供应链减排投入,实现制造商与零售商利润的帕累托改进;持股合作为节能服务公司带来的直接利润改进较低,制造商可通过转移支付等方式以促成合作。研究工作聚焦于节能服务行业的新模式,为供应链减排策略的选择提供参考依据。
优先出版时间:2024-08-31 DOI: 10.13195/j.kzyjc.2024.0349
摘要:为了提高输电铁塔高空作业自动化水平和保障高空作业机器人设备安全,针对传统RRT和A*等算法在角钢塔高空复杂环境中无法快速规划机械臂安全轨迹的问题,提出一种基于铁塔模型的双向天牛须知情快速随机扩展树轨迹规划算法(BAS-InformedRRT*Connect,BI-RRT*Connect)。首先数字重构高空机器人作业环境,利用模型配准方法,获取输电铁塔精准模型信息,接着根据铁塔模型寻求机械臂末端点和作业目标之间的可行路径,并添加天牛须算法改进随机采样过程,采用两只天牛相互寻找快速获取初始路径解,最后将初始路径作为先验知识构建椭圆体采样区域以优化路径。在Unity环境下搭建实验平台将所提算法与RRT和A*等四种传统算法进行比较,实验结果表明,该算法在输电铁塔多种作业区域下都具有求解速度快,求解质量高的良好效果。
优先出版时间:2024-08-31 DOI: 10.13195/j.kzyjc.2024.0357
摘要:线上渠道和线下渠道在产品价格和服务等方面存在竞争,并受到供应链结构的显著影响.利用微分博弈 方法在三类供应链结构下研究了线上线下渠道竞争,包括集中式结构、分散式结构和收益共享结构.通过对微分 博弈模型的求解获得了不同供应链结构下线上线下零售价格、促销努力和物流努力策略. 研究发现:分散式结 构提高了线下零售价格、促销努力与线上零售价格,并降低了线上促销努力和物流努力.收益共享结构提高了线 下零售价格、促销努力与线上零售价格、物流努力,并降低了线上促销努力.分散式结构和收益共享结构使电商 作出了比线下零售商更小的促销努力并制定了更高的零售价格.当物流努力边际贡献充分大时,物流努力的存在 总是使得线上产品商誉高于线下.数值实验表明,收益共享结构对线下渠道最有利而集中式结构对线上渠道最有 利,物流努力对线上渠道是否有利依赖其对线上产品商誉的边际贡献.
优先出版时间:2024-08-31 DOI: 10.13195/j.kzyjc.2024.0375
摘要:岭回归由于简单高效被用于处理各种机器学习任务,并取得令人称赞的结果。然而,当岭回归直接应用于聚类时很容易触发平凡解。为解决此问题,本文提出基于约束图的鲁棒不相关岭回归方法(Robust Uncorrelated ridge Regression with Constraint Graph,简称为RURCG)。首先,该方法利用广义不相关约束使岭回归嵌入了流形结构,保证其聚类时存在闭式解;其次,为避免异常数据对聚类的影响,对岭回归的误差项施加二值向量,该向量的元素具有明确的物理意义,若数据正常,则其值为1,否则为0;接着,对岭回归嵌入拉普拉斯构造以获取数据的局部几何结构,为使聚类结构更为充分,其中涉及的图矩阵包含了成对约束和标签信息;最后,运用迭代优化策略求解目标函数,在8个基准数据集上的仿真实验验证了所提方法的有效性。
优先出版时间:2024-08-31 DOI: 10.13195/j.kzyjc.2024.0380
摘要:针对多自主移动机器人 (Autonomous Mobile Robot, AMR) 调度系统中的决策规划问题,本文提出了一种分层策略的基于时空冲突和非完整约束下的多 AMR 调度算法。首先,提出加权时空混合 A* 算法作为算法的底层,进行单 AMR 路径规划,确保规划的路径满足阿克曼类型 AMR 的运动学模型。然后,引入结合分离轴定理的冲突检测树作为算法的上层,对底层算法规划出的路径进行精确的时空冲突检测。检测出的时空冲突被用作底层算法的时空约束。最后,再次调用底层算法,考虑时空约束进行路径规划,以实现高效的 AMR 冲突消解。仿真结果证明,本文所提算法能够为多 AMR 调度系统高效的规划出满足非完整约束的无冲突路径。
优先出版时间:2024-08-31 DOI: 10.13195/j.kzyjc.2024.0381
摘要:针对直驱风电场弱交流电网诱发的次同步振荡问题,提出一种基于固定时间滑模控制的次同步振荡抑制方法.首先,根据直驱风电场弱交流电网的扰动方程,研究次同步振荡的发生机理,并对不同强度弱交流电网下的次同步振荡特性进行分析;其次,构建网侧变流器电流跟踪误差动态方程,并在滑动变量中采用双曲正切函数代替符号函数,避免传统固定时间终端滑模控制存在的奇异性问题;最终,通过设计固定时间非奇异终端滑模控制,保证电流误差在固定时间内收敛至零附近的邻域内,并利用李雅普诺夫定理证明了闭环系统的固定时间稳定性.通过对比仿真验证了所提控制方法能够在固定时间内实现直驱风电场在不同强度弱交流电网运行工况下对次同步振荡的有效抑制.
摘要:针对电动汽车的物流配送问题,考虑到客户需求可以拆分成若干离散订单的特性,以最小化电动汽车的固定成本、路径行驶成本、充电成本以及时间窗惩罚成本为目标,构建了需求可离散拆分的多车型电动汽车充电策略和路径优化模型。针对模型的特点,设计了改进的遗传-模拟退火算法。为验证算法的有效性,进行了算例分析。算例结果表明,考虑需求可离散拆分的情况下,该算法能够快速优化出电动汽车的充电策略和配送路径,其中部分充电策略不仅缩短了充电时间,还大幅度降低了总成本。敏感性分析结果显示,充电等待时间增加会导致两种策略的时间窗惩罚成本上升,但部分充电策略的成本增速显著低于完全充电策略,尤其适用于充电等待时间较长的情况。本研究为物流企业电动汽车配送优化提供了重要参考。
优先出版时间:2024-08-01 DOI: 10.13195/j.kzyjc.2024.0379
摘要:本文研究了基于超螺旋滑模算法的异步电机转子磁链观测问题.根据异步电机电流模型,设计了超螺旋算法下的转子磁链开环估计模型.为提高该模型对于转子电阻及外部扰动变化的鲁棒性,对观测器中电机参数的不确定部分进行估计.进一步地,将观测器得到的转子磁链引到定子电流估计方程中,得到闭环结构,提高了磁链观测精度和收敛速度.通过重构模型中待观测的中间变量,解决了传统观测器模型对于转子磁链求解时的积分漂移和初值误差问题.针对磁链与转子转速的耦合问题,通过处理扰动给出了系统稳定的充分条件.仿真和实验结果验证了本文算法的可行性和有效性.
优先出版时间:2024-08-01 DOI: 10.13195/j.kzyjc.2024.0363
摘要:针对挖掘机无人作业,考虑挖掘机工作装置液压系统的强非线性、参数不确定性、时变载荷和高能耗问题,提出一种改进的全格式动态线性化无模型自适应控制方案。首先,通过分析驱动空间与任务空间的映射关系,将挖掘机铲斗齿尖的轨迹跟踪问题转化为液压缸活塞杆伸缩量跟踪问题;其次,为了保证轨迹的连续性和平顺性、降低计算复杂程度、并减少系统在启动和停止时的不稳定性,利用5次NURBS曲线插值方法对挖掘轨迹进行规划;进一步,设计改进的全格式动态线性化无模型自适应控制算法实现挖掘机无人作业,并为减少能量消耗,在输入准则函数中引入能量函数的惩罚项,在确保良好跟踪精度的同时实现最优能耗。最后,对所提方案进行实例仿真,验证该方案的可行性和优越性。
优先出版时间:2024-08-01 DOI: 10.13195/j.kzyjc.2024.0408
摘要:基于自适应视线制导方法(ALOS)、有限时间扩张状态观测器(FTESO)和鲁棒模型预测控制(RMPC)提出了一种基于横摇约束的船舶路径跟踪控制方法。ALOS通过路径点自动更新可接受半径,获得更灵活的机动性;FTESO用于船舶运动状态和外部干扰的估计,RMPC控制器设计中将输入约束、横摇约束和束和无限时域性能指标约束纳入优化目标,转化为线性矩阵不等式凸优化,进行多目标协同控制。根据Lyapunov稳定性理论和齐次理论,确保系统的闭环稳定性及有限时间内的收敛性。仿真结果表示,虽然经过极限角度时所提方法路径跟踪超调量略大,但所提方法减摇率为83.40%,与LOS+MPC方法相比减摇率提升了51.28%。验证了所提控制方法的有效性和鲁棒性,可为欠驱动船舶舵减摇控制设计提供参考。
优先出版时间:2024-07-28 DOI: 10.13195/j.kzyjc.2023.1496
摘要:基于状态反馈和输出反馈控制方法,解决离散线性领导-跟随多智能体系统的二分状态一致性跟踪控制问题.其中,领导者具有离散自治动态并能够产生理想参考轨迹信号.首先,基于盖尔圆盘定理和离散代数黎卡提方程提出一种新型分布式状态反馈控制协议.其中,基于系统拓扑矩阵设计的控制耦合增益能够使得全局跟踪误差系统包含在单位圆的稳定域内.在结构平衡条件下,通过Lyapunov稳定性理论和分离原理可证明符号有向图下两个对立子组的智能体可实现二分状态一致.然后,基于邻居合作-竞争交互信息引入新型分布式状态观测器以实现跟随者状态的跟踪.进而提出一类基于观测器的输出反馈二分控制协议,在状态不可获知情况下可实现理想的领导-跟随二分状态跟踪,也可应用于更一般的传统一致性控制场景.最后,给出两个仿真算例验证所提算法的可行性和有效性.
优先出版时间:2024-07-28 DOI: 10.13195/j.kzyjc.2024.0045
摘要:分时电价政策与车辆到电网技术能平衡电网负载、增强电网削峰填谷能力,也可作为物流行业降本增利的新途径.综合考虑分时电价、客户需求、电动车能耗以及充电/放电策略等因素,以总配送成本最小、放电利润最大为目标,建立电动车配送-充电/放电路径规划的多目标混合整数规划模型,并根据模型特性设计改进非支配排序遗传算法求解.采用多类型算例开展实验,结果表明:本文方法能在较短时间内科学规划电动车配送-充电/放电路径,不但能有效降低总配送成本、提高放电利润,而且能协助电力公司维持电网平稳运行,为广大电能用户营造良好的用电环境,实现物流企业、电力公司与电能用户三方互利共赢.
优先出版时间:2024-07-28 DOI: 10.13195/j.kzyjc.2024.0011
摘要:针对联合检测与跟踪范式中存在的检测特征和Re-ID 特征相互竞争的问题和在复杂场景下难以保持被遮挡目标视觉一致性关系的问题,本文提出了一个端到端的超图神经网络关联的多目标跟踪方法(Hypergraph neural network matching tracking, HGTracker) 。首先,HGTracker 设计了一个增强的空间金字塔池化网络(Enhanced Spatial Pyramid Pooling Networks, ESPPNet) 模块用来提高目标检测骨干网络的检测能力,该模块通过聚合不同维度的特征,来适应跟踪过程的不同任务,有效地缓解了一阶段跟踪方法中检测任务和Re-ID任务相互竞争的问题。其次,提出一个基于长短期超图神经网络(Short-term and Long-term Hypergraph neural network matching)的数据关联模块,通过设计长期超图神经网络和短期超图神经网络来分别关联未被遮挡和被遮挡的检测视觉特征,将数据关联问题转化为轨迹超图和检测超图之间的超图匹配问题,跟踪器将轨迹片段信息和当前检测帧信息之间的关系建模为超图神经网络,在严重遮挡的情况下保持了视觉轨迹的一致性。通过在MOT17 和MOT20 数据集上实验对比,验证了HGTracker 跟踪方法的有效性。
优先出版时间:2024-07-28 DOI: 10.13195/j.kzyjc.2023.1647
摘要:针对扩展目标多伯努利滤波器(ECBMeMBer)在复杂环境下对衍生扩展目标跟踪性能严重下降以及无法提取目标轨迹的问题,本文提出一种基于轨迹随机有限集(Trajectory RFS)的衍生扩展目标多伯努利滤波算法(S-TCBMeMBer).首先,利用轨迹多伯努利RFS(Trajectory MBer-RFS)描述多扩展目标的轨迹序列,从而为扩展目标提供连续的轨迹信息.其次,提出一种多伯努利衍生模型,通过原始扩展目标的航向角与衍生扩展目标的偏转角之间的三角函数关系式建立不同衍生扩展目标的运动方程与动力学转移模型,从而实现对衍生扩展目标质心状态与外形状态的联合估计.随后,基于轨迹MBer-RFS和所提多伯努利衍生模型推导并提出S-TCBMeMBer滤波器,并在线性高斯条件下给出伽玛高斯逆威沙特(GGIW)混合实现.仿真结果表明,所提算法在杂波、漏检和噪声共存的环境下能够对衍生扩展目标进行有效跟踪,并提取扩展目标完整的轨迹信息.
优先出版时间:2024-07-28 DOI: 10.13195/j.kzyjc.2024.0057
摘要:相比于刚性连杆并联机器人,绳驱并联机器人(cable-driven parallel robot, CDPR)存在结构简单轻盈、工作空间大、响应速度快及成本低廉等优点,非常适合极端空间环境。然而,由于电机、绳索和末端执行器之间存在复杂的耦合关系,CDPR工作空间和刚度的求解具有挑战性。基于此,本文提出了一种四绳驱动并联机器人工作空间与刚度的建模、分析及优化方法,并用于指导CDPR动锚点位置设计决策。首先,建立了考虑滑轮模型的CDPR运动学模型,并通过优化方法对CDPR “电机-绳索-末端”多层运动学进行了求解。然后,建立了CDPR的工作空间,并给出了工作空间优化的求解方法。进一步地,推导了CDPR的刚度模型,并给出了刚度优化的求解方法。最后,根据优化后的工作空间与刚度模型,对CDPR的动平台锚点位置设计决策进行优化,数值仿真结果和实验证明了方法的正确性与有效性。相比于刚性连杆并联机器人,绳驱并联机器人(cable-driven parallel robot, CDPR)存在结构简单轻盈、工作空间大、响应速度快及成本低廉等优点,非常适合极端空间环境。然而,由于电机、绳索和末端执行器之间存在复杂的耦合关系,CDPR工作空间和刚度的求解具有挑战性。基于此,本文提出了一种四绳驱动并联机器人工作空间与刚度的建模、分析及优化方法,并用于指导CDPR动锚点位置设计决策。首先,建立了考虑滑轮模型的CDPR运动学模型,并通过优化方法对CDPR “电机-绳索-末端”多层运动学进行了求解。然后,建立了CDPR的工作空间,并给出了工作空间优化的求解方法。进一步地,推导了CDPR的刚度模型,并给出了刚度优化的求解方法。最后,根据优化后的工作空间与刚度模型,对CDPR的动平台锚点位置设计决策进行优化,数值仿真结果和实验证明了方法的正确性与有效性。
优先出版时间:2024-07-28 DOI: 10.13195/j.kzyjc.2024.0147
摘要:近年来,值函数估计偏差修正已成为深度强化学习领域的一个重要研究方向。现有大多数研究工作均聚焦于如何缓解高估偏差, 但却忽略了缓解高估偏差过程中引入的低估偏差问题。 为此, 本文通过 在Actor-Critic框架中灵活设置多个Actor和Critic网络来缓解值函数低估偏差,提出一种基于组合网络优化的延迟深度确定性策略梯度(D3PG-CNO)。 D3PG-CNO的主要思路为: 在经验收集阶段用一个Critic网络对多个Actor网络的输出动作进行评估,并选择最优的动作存入经验池。在经验训练阶段,从多个Critic网络中选出在当前状态-动作对下估计结果最小的Critic网络并用其对多个Actor网络的输出动作进行评估,选择评估最大值进行目标值的计算。MuJoCo平台上的实验结果显示,D3PG-CNO相比现有的确定性策略梯度算法显著降低了估计偏差,提高了算法稳定性和收敛速度,并在多个任务中表现出更好的性能。
优先出版时间:2024-07-28 DOI: 10.13195/j.kzyjc.2024.0178
摘要:P2P2B模式下云服务投入是工业互联网(Industrial Internet of Things,IIoT)平台的关键战略决策之一. 构建由IIoT平台、龙头企业、潜在客户构成的演化博弈模型,研究IIoT平台在公有云研发投入和私有云研发投入中的策略选择及其与龙头企业的生态合作问题. 结果表明:虽然公有云存在数据泄露隐患,但较高的规模收益仍会吸引IIoT平台投入公有云研发,而平台搭建期内龙头企业的高合作意愿会促使平台投入私有云,但随着龙头企业合作研发的比例增加,平台又将改变其投入策略. 驱动龙头企业合作的因素可以是成本收益、技术提升等直接因素,也可以是规模收益、数据泄露概率等间接因素. 最后,基于平台生命周期探讨了初创期、平台搭建期与生态系统期IIoT平台的系统稳定策略并得到了相应的管理启示.
优先出版时间:2024-07-28 DOI: 10.13195/j.kzyjc.2024.0192
摘要:三电机卷绕系统是一个强耦合非线性时变系统, 存在卷轴半径、转动惯量以及摩擦系数等时变参数, 导致张力协同控制精度. 为提高卷绕系统模型准确度、实时优化张力协同控制系统的动态性能, 本文提出了一种基于改进鲸鱼算法优化的多核最小二乘支持向量机回归(WOA-M-LSSVR)预测模型和基于纵横交叉优化算法(CSO)优化的模型预测张力协同控制系统. 根据最小二乘支持向量机回归原理建立多核 LSSVR 回归模型, 并使用改进的自适应鲸鱼算法进行离线优化,得到系统预测模型;根据建立的预测模型, 构建自适应更新的模型预测控制器, 引入纵横交叉优化算法实现优化求解, 最大程度避免了求解陷入局部最优的情况, 提高了张力控制系统的动态性能. 通过仿真和实验分析, 证明了本文设计的张力协同控制系统具有良好的动态性能和鲁棒性.
优先出版时间:2024-07-28 DOI: 10.13195/j.kzyjc.2024.0194
摘要:非线性方程组问题的求解难点在于多根联解的同步解出,针对邻域拥挤差分进化算法存在的多根解出不完整、丢根及易陷入局部最优等问题,提出一种基于邻域交叉的双变异差分进化算法。双变异策略基于个体适应度值综合学习邻域和全局的进化信息,以提高种群多样性并同步增强其局部最优规避性能;邻域交叉策略通过种群分组与不同交叉操作实现进化个体的差异性引导,以规避多根的联解丢失并改善计算资源的利用效率.~实验结果表明,所提算法能够有效实现非线性方程组的多根联解且在找根率和成功率指标上性能表现优异。
优先出版时间:2024-07-28 DOI: 10.13195/j.kzyjc.2024.0260
摘要:针对仿真数据驱动的迁移故障诊断方法中虚实数据域差异过大带来的负迁移问题,提出了一种基于虚实域多层级联合适应网络(virtual-real domain multi-level Joint adaption network , VDMJAN)的故障仿真到现实诊断方法?论文以滚动轴承为分析对象,结合实际工况建立了基于非规则损伤形态的轴承故障动力学仿真模型,生成了测试实体轴承的故障虚拟信号并结合故障机理进行了可仿真信号可迁移性模式分析;构建了不同尺寸卷积核的深度卷积神经网络对虚实域信号进行了粗细粒度特征提取,增强了用于状态辨识特征的域不变性与全面性;采用多分类器并行输出概率融合法对测试样本进行伪标签标注,对仿真与实测样本进行了不同层级的领域特征精细对齐,实现了虚实数据的跨域一致性;引入了VDMJAN训练的有效性损失保证了多分类器对目标域实测样本状态识别确定性与一致性,并采用筛选的类对齐实测数据对分类器进行校正微调,消除了分类器对仿真样本的偏向性,以更好的实现适应目标域测试样本的分类任务。两个实验分析结果表明,提出的VDMJAN以单源域的轴承故障仿真样本为驱动,在实测故障样本标签信息完全缺失的情况下,能够有效实现从仿真到现实的故障诊断,在特殊环境下样本稀缺的设备故障诊断领域具有较好的应用前景?
优先出版时间:2024-07-25 DOI: 10.13195/j.kzyjc.2024.0290
摘要:针对离线知识蒸馏中因教师与学生之间规模差距过大,知识难以有效传递,导致学生性能不佳的问题,提出了一种基于自监督对抗学习的多尺度知识蒸馏方法 (SAMKD)。利用自监督和对抗学习来进一步开发中间多尺度特征与网络末端输出特征 logits 的潜力。首先,引入多角度几何变换图像监督网络学习模型;其次,设计多分支辅助网络来提取主干网络的多尺度特征,获得图像的 logits 输出;最后,利用生成对抗网络的二元博弈思想进行多阶段对抗训练,通过该对抗训练能够将多层次的知识通过蒸馏方法充分传递。通过实验分析,在三个具有挑战性的公开数据集 CIFAR-10、CIFAR-100 和 Tiny-ImageNet 上进行充分实验,所提方法与其他先进知识蒸馏方法的比较中展现了强大的竞争力。
优先出版时间:2024-07-25 DOI: 10.13195/j.kzyjc.2024.0293
摘要:摘 要:供水管网的漏损控制与监测难题普遍存在,传统基于压力敏感度对管网进行分区并布设压力传感器的方法仅考虑了管网节点压力变化情况,并未结合管网自身高程信息,减压阀调压时局部压力过高效果不明显.针对此问题,首先将管网节点压力敏感度与高程差耦合,将FCM算法中目标函数中的距离定义为特征距离与高程距离之和,建立了包含高程邻域信息的新的聚类目标函数,实现节点分区聚类.并在在分区入口处布设减压阀,采用GA求解阀后压力实现分区内各节点压力的实时精细化调控,联合智能算法与经验法在各个分区布置压力传感器,并通过漏损模型验证传感器布置的合理性.结果表明:分四个区的方案将BIN管网的漏损率降低至6.55 %,相较初始管网降低了22.79 %,联合智能算法与经验法进行传感器布设对管网漏损的监测效果显著,因此,引入高程信息的FCM算法管网漏损控制优化策略具有有效性及优越性.
优先出版时间:2024-07-24 DOI: 10.13195/j.kzyjc.2024.0545
摘要:针对模型参数未知的线性离散系统,本文提出一种数据驱动的双模模型预测控制方法,无需预先对系统进行建模,能够实现在约束条件下对目标设定点的最优跟踪控制。首先,根据有限的系统历史运行数据预测系统未来一段时间的运行轨迹,并在代价函数中加入实时优化的人工平衡点,通过在线求解滚动优化问题获得控制输入,进而平稳地驱动系统进入到一个控制不变集内。接着在控制不变集内,基于系统历史运行数据,采用策略迭代的方法求解动态反馈控制器,同时可以得到静态前馈控制器,实现驱动系统收敛到平衡点的局部最优跟踪控制。最后,证明了该方法的稳定性,并将其应用到一个线性化的四容水箱系统当中,实验结果表明该方法有效可行,具有更小的超调量和更好的收敛性能。
优先出版时间:2024-07-24 DOI: 10.13195/j.kzyjc.2024.0417
摘要:针对一类存在建模误差、外部扰动和时变非对称输出约束的机械臂系统位置跟踪控制问题, 本文提出了一种固定时间反步自适应优化控制方法. 首先, 通过设计固定时间干扰观测器来快速准确地估计机械臂系统的建模误差和外部扰动. 其次, 将反步法与新型障碍Lyapunov函数相结合, 并基于一种滚动自适应律完成考虑机械臂输出约束的固定时间控制器设计, 同时采用指令滤波器和切换函数解决控制器推导过程中存在的“微分爆炸”和“虚拟控制量奇异”问题. 再次, 利用改进的北方苍鹰(Improved Northern Goshawk, ING)算法对机械臂系统的控制参数进行优化整定, 进一步提高系统的收敛速度和稳态精度. 理论分析表明, 系统跟踪误差能够在固定时间内收敛到接近零的小邻域内, 且始终满足输出约束的要求. 最后, 通过PUMA560型机械臂的仿真对比研究验证了本文所提方法的有效性.
优先出版时间:2024-07-11 DOI: 10.13195/j.kzyjc.2024.0033
摘要:入口匝道控制作为高速公路主动管控的重要技术之一,能够有效解决高速公路合流区拥堵问题,合理的控制策略是保证控制效果的前提。本文提出一种基于加点策略的Kriging辅助模拟退火遗传优化二型模糊控制方法,该方法能够兼顾高速公路主线和匝道的运行性能,基于二型模糊逻辑进行控制策略推理,结合变论域思想和搜索算法调节模糊控制参数,并通过加点更新的代理模型来解决仿真优化中耗时过大的问题。以济南绕城高速为实例,对比验证了上述控制方法的有效性和优越性,并针对不同的流量场景设计不同的控制方法。实验结果表明,所设计的控制策略应用于拥堵情况下,能够在匝道约束内有效优化主线运行状态,在非拥堵情况下能够在节约计算资源与成本的同时,进一步提升主线和匝道的运行性能。
优先出版时间:2024-07-08 DOI: 10.13195/j.kzyjc.2024.0105
摘要:空气质量指数(AQI)的变化具有时间和空间双重属性,同时呈现出非线性、非平稳、高噪声和高波动等特征,已有的AQI预测方法难以充分提取其时空特征并实现稳定的有效预测。本文对AQI时空数据进行有效标识和提取,通过构建三维空间张量,提出一种时空数据驱动下基于多尺度3D-CNN-CBAM模型的AQI预测方法。首先,在考虑本地与邻近地区之间空间域权重的基础上,运用互信息(MI)对AQI影响因素进行筛选。其次,利用多元经验模态分解(MEMD)方法和样本熵(SE)分别将历史数据和影响因素序列分解重构为更具规律性的高频序列、低频序列和趋势项。然后,根据分解得到的各地AQI数据、大气污染物浓度值和气象因素变量,构建子序列三维空间张量,以反映其时空特征演变。在此基础上,设计多尺度三维卷积注意力机制(3D-CNN-CBAM)网络模型对子序列进行预测,以有效提取AQI与其影响因素之间的关键时空关联性特征,并降低噪声信息对拟合效果的干扰。最后,集成得到目的地AQI预测值。将本文方法应用于长江三角洲城市群2019年-2023年日度AQI预测。结果表明,该方法适用于具有时空属性的空气质量指数预测,与现有方法相比具有更高的预测精度和适用性。
优先出版时间:2024-07-08 DOI: 10.13195/j.kzyjc.2024.0055
摘要:针对现有的不完备多视图聚类方法存在无法准确利用缺失视图的潜在信息和未能充分利用视图间的互补信息以及高阶相关性等问题。本文提出了一种新的基于多级自表示约束的不完备多视图聚类CMLC (incomplete multi-view Clustering based on Multi-Level self representation Constraints)。CMLC利用公共潜在表示来恢复缺失值从而有效获取缺失部分的潜在信息。为了获得多视图数据的统一低秩表示,CMLC首先通过多级自表示约束来捕获多视图数据内部的一致信息和视图间的互补信息,同时利用多级误差表示提高模型对噪声的鲁棒性,接着通过张量对数行列式来捕获视图间的高阶相似信息,最后引入距离正则项来捕获数据的局部信息。与九个对比方法在多种缺失率下的六个仿真不完备多视图数据集上进行实验对比,结果表明CMLC均获得了最好的聚类性能。
优先出版时间:2024-07-04 DOI: 10.13195/j.kzyjc.2023.1649
摘要:功率预测是实现电能供需平衡、维持电网稳定运行的一项重要任务。随着分布式海上光伏系统的发展,光伏利用率不断提升,同时对光伏功率预测提出了更高的要求。针对机器学习方法在光伏功率时间序列预测中存在的样本数量不足、预测精度低以及隐私泄露等问题,本文提出一种基于联邦学习和变分模态分解的长短期记忆神经网络功率预测模型(FL-VMD-LSTM)。利用主成分分析法(PCA)和三次样条插值对气象数据进行预处理,同时利用VMD将光伏功率时间序列分解为多个分量进行分步预测,降低光伏功率时间序列的非平稳性和复杂度。通过横向联邦学习的本地训练和参数聚合方法,实现在保证数据隐私安全情况下的光伏功率预测。通过四个算例进行仿真实验,验证结果表明FL-VMD-LSTM模型在光伏功率预测方面具有较高精度,与传统算法相比RMSE和MAE分别降低了55.7%和55.5%。
优先出版时间:2024-07-04 DOI: 10.13195/j.kzyjc.2023.1794
摘要:本文针对具有约束的不确定主动悬架系统(ASS), 提出了一种考虑输入和输出约束的自适应容错控制方案. 首先, 设计了一个有界约束函数来同时约束车身和轮胎的垂向位移, 以实现驾驶舒适度与轮胎抓地力之间的平衡. 其次, 为了进一步提高驾驶舒适度, 针对不确定车身子系统, 提出了一种考虑输入约束的自适应容错控制律, 并与设计的有界约束函数进行叠加, 得到了最终的控制律. 其中, 考虑到执行器故障及ASS不确定性带来的未知项, 采用自适应控制来逼近未知项的上界, 同时, 引入辅助系统对输入饱和进行补偿. 最终, 分析了ASS的稳定性, 并通过仿真对比验证了本文提出方案的有效性.
优先出版时间:2024-07-04 DOI: 10.13195/j.kzyjc.2023.1642
摘要:Fal函数是非线性扩张状态观测器(Fal\_NESO)的核心单元,其构成的滤波器(FalFilter)对于控制系统的性能也具有重要影响.通过对FalFilter和Fal函数的性能分析,提出一种在定义域内连续可导且只有一个待整定参数的CFal函数,并证明了由CFal函数构成滤波器(CFalFilter)和非线性扩张状态观测器(CFal\_NESO)的可行性.然后,联合CFalFilter和CFal\_NESO,得到一种带滤波器的新型观测器(CFalFilter-CFal\_NESO),用于处理测量环节含噪声干扰的情况.最后,通过典型实例将CFal函数与两个改进的Fal函数进行对比实验,实验结果表明,在跟踪速度趋近条件下,~CFalFilter滤波效果最佳;仅改变Fal函数参数,~CFal\_NESO能够更好的提取噪声环境中的信号状态,同时也减小了因观测器阶数增加而带来的参数整定困难;在不改变参数条件下,~CFalFilter-CFal\_NESO进一步提高了对带有测量噪声的信号的状态跟踪性能.本文所提CFalFilter、CFal\_NESO和CFalFilter-CFal\_NESO对于大多数非线性、高阶系统的滤波和观测均能适用,具有重要学术意义和实际应用价值.
优先出版时间:2024-07-04 DOI: 10.13195/j.kzyjc.2023.1783
摘要:在竹片表面缺陷检测中,竹片表面缺陷形状各异,成像环境脏乱,现有基于卷积神经网络(CNN)的 目标检测方法面对这样特定的数据时检测准确率较低;而且竹片来源复杂且有其他条件限制,例如不同季节成 色各异等限制,因此无法采集所有类型的数据,导致竹片表面缺陷数据量少,以至于CNN不能充分学习。针对 以上问题,本文提出了一种改进的ResNet50网络与迁移学习结合的竹片缺陷识别方法。首先,将获得的正负样 本数据按照一定比例分为训练集、验证集和测试集;其次,利用OTSU算法和LBP算法对竹片图像进行二值化 处理和特征提取,以减少噪音影响;最后将ResNet50作为骨干网络加入L2正则化和标签平滑与迁移学习结合, 得到适应于竹片缺陷检测识别的优化模型。将所提检测网络与VGG16、DenceNet121、ResNet50以及目前常用 于工业检测的YOLOv3分别在相同比例训练测试集上进行训练和测试。实验结果表明,所提检测网络的平均精 度均值(mAP)竹片表面缺陷检测数据集上比VGG16、 DenceNet121、 YOLOv3和ResNet50的mAP值分别提高 了23.45、18.6、19.51和2.76个百分点。所提方法能够针对形状各异的竹片表面缺陷进行有效检测,且降低了时 间消耗,在实际工业运用中具有很好的效果。
优先出版时间:2024-07-04 DOI: 10.13195/j.kzyjc.2024.0009
摘要:本文主要研究了基于动态输出反馈的离散Markov跳变系统有限时间 $H_{\infty}$ 控制问题. 针对实际系统中状态不可测和存在外界扰动的情况, 提出了动态输出反馈控制策略, 同时基于有限时间 $H_{\infty}$ 控制理论和Markov跳变系统理论, 分析闭环系统的稳定性并利用线性矩阵不等式 (LMI) 技术获取可行的充分条件. 所提方法给出较为宽松的矩阵不等式解耦方案, 具有较大的适用范围. 最后, 通过数值案例验证所提控制方案的有效性.
优先出版时间:2024-07-03 DOI: 10.13195/j.kzyjc.2024.0208
摘要:针对多级子工艺稀土萃取生产采用人工根据经验逐级调药的方式, 容易导致人工循环调药、生产指标波动大的问题, 提出了一种基于 Laguerre 函数的分布式模型预测控制方法调节药剂量. 首先基于多稀土组分萃取机理建立具有串联结构的分布式状态空间方程, 然后拓展成嵌有积分器的增广状态空间模型;其次, 利用多组分稀土萃取中各级子工艺仅与其上游子工艺存在耦合的特点, 构造一种具有输入约束的非迭代递阶求解分布式药剂量目标优化函数;接着, 由于采用较大的预测时域能够实现更高的控制精度, 但会急剧增大其计算量. 为此, 利用 Laguerre 函数表示控制增量, 将原目标函数转化为含有 Laguerre 系数的目标函数, 并利用二次规划进行求解.这种方法使得计算量与预测时域无关, 而仅与 Laguerre 函数的系数数量有关, 不会随着预测时域的范围改变. 仿真实验表明本文所提方法的有效性.
优先出版时间:2024-07-03 DOI: 10.13195/j.kzyjc.2024.0201
摘要:针对运动想象脑电信号解码问题提出了因果稀疏特征优化方法,旨在选择因果判别特征以增强其解码准确性。首先,利用希尔伯特-黄变换(Hilbert-Huang Transform, HHT)提取脑电信号各通道中的边际谱能量。然后,运用样本重加权去相关性算子(Sample Reweighted Decorrelation Operator, SRDO)对特征进行加权优化,以消除干扰及冗余特征与识别运动想象的判别特征间的虚假关联。在此基础上,利用亲和传播(Affinity Propagation, AP)聚类算法开发特征在空间分布中的潜在关系,并结合迭代稀疏分组Lasso (iterative Sparse-Group Lasso, iSGL),通过同时考虑组内与组间特征的重要性,对特征进行优化,以提升运动想象脑电信号的解码准确率。最后,利用支持向量机(Support Vector Machine, SVM)在二分类运动想象实验数据集上进行了5折交叉验证,实验结果显示其平均准确率达到了92.30%,与原特征相比提升近4%。此外,通过与不同方法的对比实验,也充分证明了本研究提出方法的优越性,表明该方法可以作为一种推动脑-机接口发展的有力解决方案。
优先出版时间:2024-07-03 DOI: 10.13195/j.kzyjc.2024.0351
摘要:针对有限通信带宽下的多智能体系统最优资源分配问题, 研究了一种周期事件触发的分布式优化算法. 在连续时间型分布式加权梯度算法上, 通过一种新的李雅普诺夫函数综合出一种事件触发通信机制, 其触发器只需以一个固定周期采样自身状态信息并评估触发条件以判断是否需要进行通信, 稳定性分析表明提出的分布式优化算法以指数速率收敛到最优解. 这种周期事件触发机制不仅自然地排除芝诺行为, 而且不需要触发器进行实时的检测. 最后数值仿真验证了所提出分布式事件触发优化算法的有效性.
优先出版时间:2024-07-02 DOI: 10.13195/j.kzyjc.2024.0128
摘要:为推进城市物流配送领域的节能减排,提出了时间—位置依赖型多目标绿色车辆路径问题。首先,提出考虑不同情形交通拥堵状况下的车辆行驶时间计算方法;其次,综合考虑车辆行驶速度动态变化、实时载重等因素对油耗和碳排放的影响,建立车辆油耗和碳排放测度模型;然后,分析车辆配送时刻和顾客满意度之间的关系,建立顾客满意度函数;在此基础上,以车辆使用成本、油耗和碳排放成本之和最小化和顾客平均满意度最大化作为优化目标,构建数学模型;最后,设计一种改进的头脑风暴优化算法进行求解。实验结果表明,构建的模型和提出的算法能在物流配送的多个目标之间取得平衡,有效规避交通拥堵,降低物流配送总成本,减少油耗和碳排放,提高顾客满意度。
优先出版时间:2024-07-02 DOI: 10.13195/j.kzyjc.2024.0123
摘要:为了解决部分可观离散事件系统(Discrete Event Systems,DES)的故障预测问题,提出了一种基于标签时间Petri网的DES故障概率及发生时间的预测方法.首先,利用标签时间Petri网系统的修正状态类图,得到与观测到的时间标签序列一致的有效路径,从而获得初步的故障诊断结果.其次,根据检测到的故障类的概率密度分布,并结合Gauss–Kronrod积分法计算每个故障类的发生概率;再将时间段细分,进而预测故障类发生的时间,实现对DES的故障预防.最后,以交替位协议为实例验证所提方法的可利用性.结果表明,该方法能够有效地估计故障发生的概率,并提供有针对性的故障发生时间信息;其应用有望在实际工业系统中提高故障诊断的效率和准确性,且能够提前预防故障的发生以降低系统故障造成的损失.
优先出版时间:2024-07-02 DOI: 10.13195/j.kzyjc.2024.0119
摘要:由地方政府委托回收商回收处置低值可回收物的委托代理系统中, 回收商的能力类型和努力水平是其私有信息, 导致了双重不对称信息问题, 而回收商的公平偏好也对地方政府委托合同的实施效果产生影响. 本文考虑双重信息不对称下回收商具有横向公平偏好的激励机制设计问题, 构建了完全理性、劣势和占优不公平偏好下的低值可回收物回收处置系统的激励机制模型, 刻画了最优的契约特征. 研究表明: 劣势不公平偏好下以按量补贴为主有助于抵消嫉妒负效用的影响, 激励回收商付出最佳努力水平; 而在占优不公平偏好下, 回收商接受契约的收益高于同行业平均收益, 此时应转变为以固定补贴为主, 保证回收商的基本利益更能调动回收商积极性. 同时发现, 在提供的最优契约下, 回收商的劣势不公平偏好强度越高或占优不公平偏好强度越低, 低值可回收物的的回收处置越充分, 委托代理双方收益越高.
优先出版时间:2024-07-02 DOI: 10.13195/j.kzyjc.2024.0110
摘要:针对一类具有非凸输入约束和外界干扰的不确定多输入多输出严格反馈非线性系统, 提出一种有限时间自适应神经网络动态面跟踪控制方案. 首先, 通过引入非凸约束算子, 将设计的反馈控制输入转化为与其同方向具有最大幅值的实际输入向量, 进而保证实际控制输入始终保持在非凸约束集合内. 其次, 采用径向基神经网络逼近不确定连续函数向量, 以解决控制增益矩阵上下界未知情形下的控制问题, 并利用不等式放缩处理未知有界干扰. 然后, 利用反步法设计有限时间自适应动态面跟踪控制器, 保证闭环系统所有信号均为一致最终有界的, 实现期望轨迹的有限时间跟踪控制. 最后给出数值仿真算例以说明所提出控制方案的有效性.
优先出版时间:2024-06-06 DOI: 10.13195/j.kzyjc.2023.1514
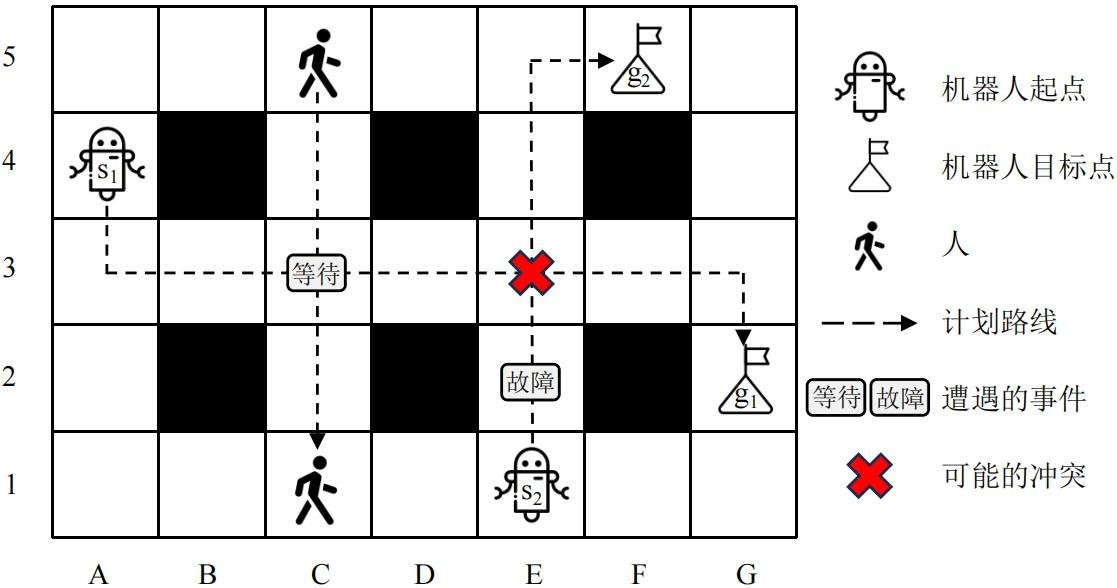
摘要:针对多机器人路径鲁棒规划时存在节点耦合度高导致求解成功率低的问题,提出一种基于耦合度矩阵的安全区间多机器人路径k鲁棒规划算法(Coupling degree matrix based k-Robust Safe Interval Path Planning, CkR-SIPP)算法。首先,根据路径规划方案统计全局地图节点耦合度信息形成耦合度矩阵,在规划过程中不断更新该矩阵。其次,引入安全区间避免机器人之间发生冲突,采用带k时间扩展的A*算法作为多机器人底层路径规划算法,其中k为设定的鲁棒因子,可在多机器人的时空关系中处理鲁棒规划问题。同时,以耦合度矩阵中信息作为寻路约束反馈给带k时间扩展的A*算法,尽量避免耦合度高的节点。最后,按照高优先级到低优先级的顺序,完成所有机器人的路径规划。在Benchmark地图上进行仿真测试,其结果表明,本文提出的CkR-SIPP算法可以有效提高多机器人路径k鲁棒规划系统的方案可靠性,较kR-SIPP算法平均提高19.2%。
优先出版时间:2024-06-06 DOI: 10.13195/j.kzyjc.2023.1481
摘要:由于生产环境及运行参数等因素的影响,煤泥浮选过程工况波动剧烈,导致产品质量下降,甚至发生异常工况.针对此问题,本文提出一种基于分布式混合贝叶斯网络的煤泥浮选过程安全运行与产品质量一体化控制方法.利用分布式建模思想,深入分析煤泥浮选过程,将其划分为若干相互关联的局部模块并建立相应的局部混合贝叶斯网络模型,进一步结合过程知识和关联变量,确定煤泥浮选过程的全局混合贝叶斯网络模型,有效提升建模的效率和精度.该模型在离散贝叶斯网络的基础上,通过引入连续节点提升控制决策的推理精度.当煤泥浮选过程发生异常工况时,通过贡献图算法识别导致异常工况的局部模块,利用贝叶斯推理获取安全运行控制决策,消除异常工况;在此基础上结合模拟退火算法获取产品质量控制决策,提升产品煤质量,实现煤泥浮选过程的安全运行与产品质量一体化控制.最后,通过煤泥浮选过程仿真实验验证本文所提方法的有效性.
优先出版时间:2024-06-05 DOI: 10.13195/j.kzyjc.2023.1455
摘要:基于邻域保持嵌入(neighborhood preserving embedding, NPE)的故障诊断算法由于其能够有效的提取过程数据的局部信息而被广泛应用,但是典型的NPE方法对参数选择和噪声等离群点敏感,同时忽略了过程数据的全局信息。因此,提出了一种基于鲁棒低秩自适应邻域保持嵌入(robust low rank adaptive neighborhood preserving embedding, RLANPE)的故障诊断算法。该方法将自适应邻域嵌入、投影学习和低秩表示集成到一个框架中,在获得全局最优解的同时能有效提取数据的局部信息;进一步地,为了探索数据的全局信息并减轻异常值的影响,对RLANPE施加了低秩表示约束,以增强RLANPE的特征提取能力和鲁棒性;此外,对RLANPE引入了基于 范数的投影约束,以从复杂的数据中选择最有判别力的特征;最后给出了RLANPE的计算复杂度分析。三个合成数据集验证了所提方法具有好的降维效果和结构保持能力,在田纳西伊斯曼过程中的平均故障检测率可达83.72%,相比对比算法提高了近3%。
优先出版时间:2024-06-05 DOI: 10.13195/j.kzyjc.2023.1142
摘要:为提高移动机器人履行系统(robotic mobile fulfillment systems,RMFS)的订单拣选效率,研究了RMFS补货货品存储分配问题。以最大化所有货架上货品之间的关联度总和为目标构建了混合整数规划模型,设计了求解问题的大规模邻域搜索算法,采用贪婪算法构造初始可行解,结合问题特征定义了破坏算子和修复算子,并利用数值实验验证了大规模邻域搜索算法的有效性。结果表明,在贪婪算法生成初始解的基础上,大规模邻域搜索算法能有效提高解的质量,在中等和大规模算例上平均提高了37.4%和21.5%。并且相比变邻域搜索算法具有更好的优化效果,在中等和大规模算例上平均提高了8.9%和10.3%。此外,利用参数分析实验研究了货架数量、货位数量以及货品分散程度对目标函数值的影响。
优先出版时间:2024-06-05 DOI: 10.13195/j.kzyjc.2023.1748
摘要:准确识别大气污染下健康风险的主要经济-社会要素,对于环境质量管理与健康风险防控具有重要意义.通过对长江三角洲(YRD)城市群PM2.5污染进行空间相关性分析,发现城市间PM2.5污染存在显著的正向空间依赖性.鉴于区域大气污染具有空间临近效应和时间趋势特征,针对现有灰色关联模型未能将面板数据整体特征与不同维度趋势特征相整合的问题,本文提出了面板数据灰色面角关联模型(GDAIM),以识别空间临近区域PM2.5健康风险的主要影响因素.通过构建三维数据网络曲面并研究曲面夹角关系,构建了面角差异性测度公式,给出了GDAIM建模过程.以YRD地区PM2.5污染``高-高"聚集区为研究对象,运用GDAIM梳理该区域PM2.5健康风险与经济-社会因素间的关联关系.结果表明,颗粒物和二氧化硫排放是影响YRD地区PM2.5健康风险的主要因素,其次是乡村人口数量和氮氧化物排放.研究结果可为大气污染联防联控战略制定提供理论支持.
优先出版时间:2024-06-05 DOI: 10.13195/j.kzyjc.2023.1591
摘要:针对膜生物反应器(membrane bio-reactor, MBR)污水处理工艺易受到进水水量、水质波动等外部干扰因素的影响导致膜透水率难以准确测量的问题,提出了一种基于自适应鲁棒模糊神经网络(adaptive robust fuzzy neural network, ARFNN)的膜透水率软测量模型。首先,构建了一种对称抗噪损失函数,降低了模型对外部干扰的敏感度,提高了软测量模型的鲁棒性;然后,设计了一种自适应梯度下降算法,动态优化模型参数,提升了软测量模型的检测精度;最后,利用李雅普诺夫函数验证了ARFNN的收敛性,分析了模型的鲁棒性,保证了模型的收敛速度和抗干扰能力。将所设计的基于ARFNN的膜透水率软测量模型应用于实际的污水处理过程中,实验结果表明,在有外部干扰的情况下,该模型不但能够实现膜透水率的在线检测,而且可以获得较高的检测精度。
优先出版时间:2024-06-05 DOI: 10.13195/j.kzyjc.2024.0035
摘要:针对多节点深空探测器附着小天体过程中的任务重规划问题,研究了规划约束模型和重规划算法.基于多节点协同工作机制和复杂时间约束形式,定义了时间约束与系统图表示,构建了描述探测器系统的分层约束图并提出了多节点探测器附着任务分层验证及搜索重规划算法.该算法结合二分思想和动态规划思想,具体包括分层时延满足验证机制和分层约束搜索算法两部分.通过对约束进行不同粒度的分级存储,建立了突发约束的时延满足验证机制.对于整体时延无法满足全部约束的情况,基于约束点的分级匹配方法,设计了多粒度约束搜索算法.仿真实验表明所提出的算法能够快速生成时间约束损失代价最小的重规划结果,以满足深空探测场景下的实时自主决策需求.
优先出版时间:2024-06-04 DOI: 10.13195/j.kzyjc.2024.0063
摘要:研究了存在惯性参数不确定性和外部干扰的刚体航天器系统的预设时间姿态跟踪控制。基于刚体航天器的二阶全驱动力学模型,利用全驱系统理论,构造了一种有限时间扩张状态观测器。在此基础上,通过引入可调参数,设计了一种新型的可调预设时间姿态跟踪控制策略。该控制策略的优点是控制系统状态的收敛时间不仅小于预设时间上界,还可以通过引入的控制参数直接调节其快慢。利用Lyapunov稳定性理论,本文证明了扩张状态观测器的收敛性和闭环控制系统的稳定性。最后,通过数值仿真验证了所设计的控制器的有效性。
优先出版时间:2024-06-04 DOI: 10.13195/j.kzyjc.2023.1752
摘要:针对网络攻击下无线传感器网络中的目标跟踪,本文构建了一种高斯混合分布式鲁棒集员滤波算法,旨在提高网络恶意攻击下移动目标跟踪的一致性和精确性。该算法可分解为校正/测量更新、聚类融合和预测/时间更新三个步骤:校正/测量更新步是根据传感器采集的测量值更新前一时刻的状态估计(先验估计);聚类融合步是采用高斯混合模型聚类算法对传感器节点估计进行分类,分为信任节点估计和非信任节点估计,非信任节点估计会被忽略而信任节点估计将参与融合;预测/时间更新步是预测目标状态的先验估计,将目标的当前时刻状态估计传递至下一时刻。仿真结果表明:该算法在抵御随机攻击、拒绝服务攻击、虚假数据注入攻击、重放攻击以及混合攻击这五种常见的网络攻击方式下,具有较好的鲁棒性。
优先出版时间:2024-06-04 DOI: 10.13195/j.kzyjc.2023.1744
摘要:母舰-舰载机协同路径规划问题(MVCRP)作为一类新兴的复杂组合优化问题,近年来得到越来越多学者的关注和研究。论文对MVCRP的概念内涵进行论述,对其与卡车-无人机协同路径规划问题的主要区别进行辨析,描述其在海事巡航执法、海上设施巡检、船只排放监测及海上搜索救援等方面的典型应用场景。论文基于母舰和舰载机数量形成的映射关系,对MVCRP研究进展进行系统综述,并对数学模型与求解算法方面的典型文献进行介绍分析。为进一步丰富研究内容,面向油田设施巡检的多舰-单机协同作业模式,论文提出了一个新的混合整数二阶锥规划模型。最后,论文从时间窗、多港口、可变速度、母舰多行程、复杂形状目标以及不确定性等多方面对MVCRP的未来研究方向进行展望。
优先出版时间:2024-06-04 DOI: 10.13195/j.kzyjc.2023.1615
摘要:多式联运可有效提高物流企业的运作效率并降低经营成本,是现代物流的未来发展趋势之一。然而其路径规划问题常常存在许多非线性约束,传统的精确算法在求解时也面临着模糊性、特殊性、动态性、高维性等挑战。鉴于仿生算法模拟生物系统时的智能优势在解决这一类复杂组合优化问题时具备广泛性和高效性。本文研究了近年来基于多式联运路径规划的仿生算法,并将其分为三类:群智能算法、进化算法和基于物理的仿生算法,总结了多式联运路径规划问题的特殊背景、关键特征和未来研究方向,广泛对比、分析了该问题下各仿生算法的原理、改进、优点和局限性,为问题的特殊场景提供合适的仿生算法。最后,讨论了多式联运路径规划问题面临的挑战和未来的研究趋势。
优先出版时间:2024-06-04 DOI: 10.13195/j.kzyjc.2023.1704
摘要:针对区间型动态不确定激励评价问题,提出了一种新的基于组织目标达成度的随机聚合动态激励评价方法. 首先,从组织整体目标出发,以立足当下(发展状态值)、面向未来(增长趋势值)的管理思维,提出一种新的融合优势概率和优势差异的指标赋权方法,以降低评估中的不确定性并提高被评价对象之间的差异度,推进决策的执行?进一步,展示了一种测度组织子目标平均发展水平的方法,为衡量组织整体均衡发展水平提供数据支撑? 在此基础上,通过灵活的奖惩措施,提出一种新的基于组织目标达成度的激励评价方法,以引导组织目标的均衡发展.最后,通过算例的形式,展示了本研究方法的特点与优势,并给出了面向三种基础管理情境下的评价结论信息以及比较分析,进一步展示了本研究方法在管理实践中的应用前景.
优先出版时间:2024-06-04 DOI: 10.13195/j.kzyjc.2023.1707
摘要:本文针对一类多阶段多情景多部门应急决策过程, 考虑心理偏好及多部门协同, 基于前景理论构建指标情景值矩阵和综合情景值矩阵等新矩阵, 提出恒定区间下的应急决策矩阵方法, 对事态发展进行全方面评估, 以实现科学高效决策. 本文给出前景值计算的矩阵形式, 使其可程序化, 能够有效应对突发事件多阶段的动态性(部门变动和方案变动), 提升决策效率. 恒定区间的引入描述了决策者的心理承受能力, 并进一步讨论恒定区间正负变化的影响以优化应急决策流程. 例如, 当承受能力增加时, 虽不改变各方案情景值的大小关系, 但可能影响最优方案的选择, 而某些情形下却不影响. 最后针对某化工厂实例进行分析, 证实该矩阵方法的有效性, 对处理这类应急决策具有较好的应用价值.
优先出版时间:2024-06-04 DOI: 10.13195/j.kzyjc.2024.0193
摘要:本文面向电力自动化领域, 针对在遥感影像关键地物信息提取过程中, 地物类别分布不均衡和不同域场景风格差异较大带来提取效果一般的问题, 采用了一种改进Deeplabv3+语义分割网络. 在主干网络ResNet101中使用IBN 模块, 用于增强模型对风格差异较大的遥感影像的泛化能力, 同时为了进一步提高模型的分割精度, 在网络中加入SE模块, 加强重要的通道信息, 缓解了信息丢失问题. 损失函数使用Dice+Focal的联合损失函数, Dice loss损失函数可以缓解类别分布不均衡对小目标提取的影响, Focal loss损失函数不仅可以使模型更关注分类困难的目标, 还可以改善Dice loss造成的网络训练的不稳定. 实验结果表明, 改进的Deeplabv3+与原Deeplabv3+模型相比, 将F1-Score提高了7. 78%, Intersection over Union 提高了5. 78%. 与其他主流语义分割模型(包括FCN、UNet、SegNet)相比, 改进Deeplabv3+在地物提取中也实现了更好的分割精度.
优先出版时间:2024-06-04 DOI: 10.13195/j.kzyjc.2024.0191
摘要:针对未知但有界噪声下的系统状态估计问题, 提出了基于粒子群优化的正交超平行空间滤波算法. 首先, 利用包裹系统状态可行集的超平行空间的顶点构建正交超平行空间, 并将其作为粒子群迭代寻优的真实状态搜索空间. 随后, 利用系统的观测值构造适应度函数, 判断粒子的优劣, 驱动粒子在正交超平行空间移动, 从而让粒子分布在真实状态附近. 最后, 将粒子群所处的不规则高似然区域用最小的外包正交超平行空间包裹, 通过线性规划求解该正交超平行空间的上下界, 获得系统状态的紧致包裹. 通过搭建的锂离子电池运行状态分析平台, 验证了本文所提算法的有效性和实用性.
优先出版时间:2024-06-04 DOI: 10.13195/j.kzyjc.2024.0132
摘要:人员能力评估是政府、企业确立岗位要求,选拔、任命优秀人才,制定培训计划,优化人才结构,促进发展的前提与基础.因人员能力具有潜在性、模糊性、动态性,且评估专家存在个人偏好、有限理性和经验局限,所以对关键人员岗位胜任能力进行客观准确评估非常困难.作为一种处理不确定信息的数据融合方法,证据理论契合关键人员评估的自然过程.因此,本文按照关键人员胜任能力评估的自然实操过程,分析人员胜任能力评估中各类数据、信息特征和证据融合推理过程,考虑评估过程的复杂性和多阶段性,考虑评估专家的有限理性与偏好,提出了一种基于偏好证据理论的多阶段多源证据融合的人员胜任能力评估决策方法,并以某校职称评审为例进行实例研究.
优先出版时间:2024-06-04 DOI: 10.13195/j.kzyjc.2024.0103
摘要:深入探究实际工程问题后, 发现求解昂贵高维多目标优化问题的需求正在逐渐增多. 一般回归模型求解这类问题时, 模型累积误差和运算量会急剧增加. 为更好地提高代理辅助进化算法的搜索效率, 并平衡高维多目标问题中种群的收敛性与多样性, 本文提出一种基于模糊分类预选策略的代理辅助进化算法 (FCPSEA). 首先, 初始化种群并进行昂贵评估, 凭借非支配关系与拥挤度构造两档训练样本集. 然后, 利用训练样本和双档案算子来较为准确的引导分类器分类. 最后, 提出一种基于模糊分类预选的模型管理策略, 根据预测的双档案类标签与隶属度来设置模型管理策略. 为验证本文算法的性能, 在包含各种特征的两组测试问题上与近几年的经典算法进行了对比实验. 实验结果表明, 该算法在求解昂贵高维多目标优化问题上具有较强的竞争力.
优先出版时间:2024-06-04 DOI: 10.13195/j.kzyjc.2024.0115
摘要:针对含不确定因素的多输入多输出非线性微分代数系统,提出一种目标全息反馈鲁棒自适应控制方法 (robust adaptive control with objective holographic feedbacks, RACOHF). 该方法考虑到了系统模型参数的不确定性 和外部扰动,同时将外部输入扰动视为模型不确定性参数的变化,在目标全息反馈控制方法的基础上,通过设计模 型不确定性部分的自适应调节律,实现多目标的自适应跟踪控制. 将该方法应用于中间再热式汽轮发电机组蒸汽 调节阀和励磁的协调控制,结果表明,在系统部分参数不确定和存在外部扰动的情况下,所提出方法能确保发电机 机端电压和有功功率等目标量在期望的工作点上运行而不发生静态偏移. 与目标全息反馈非线性控制(nonlinear control with objective holographic feedbacks, NCOHF)相比,所提出的方法(RACOHF)能更好地协调系统的动、静 态性能.
优先出版时间:2024-05-07 DOI: 10.13195/j.kzyjc.2023.1727
摘要:人工蜂群算法具有结构简单、易于实现等优点,但由于其探索能力较强而开采能力较弱,同时也存在求解精度较低和收敛速度较慢等不足之处。针对上述问题,本文提出一种基于探采平衡的双搜索模式人工蜂群算法,包含探采控制、探采执行和探采强化三个核心模块。在探采控制阶段,根据种群以探索为主并逐渐偏向开采的演化规律设计探采指标。在探采执行阶段,根据探索与开采的实现要点设计基于差异解信息引导的搜索方程。在探采强化阶段,令跟随蜂分别按照多样性排序和目标值排序选择优质食物源继续搜索。选取传统测试函数和CEC2013测试函数进行数值实验,并与八种近年来提出的高水平人工蜂群算法进行对比,结果表明本文算法在解质量和收敛速度等方面有较强的竞争力。最后,将本文算法用于食管癌发病风险预测模型优化,获得了满意的结果。
优先出版时间:2024-05-06 DOI: 10.13195/j.kzyjc.2023.1618
摘要:研究有限域上多智能体系统的一致性与可控性对包括传感器网络、机器人网络等在 内的复杂系统的控制与应用具有广泛的应用价值. 有限域上多智能体系统的一致性是指: 存在一个有限时间时刻, 在此刻所有智能体的状态值都等于有限域上的某个数值. 有限域上多智能体系统的可控性是指:通过给某些节点施加适当的控制输入, 将系统的 状态驱动至有限域上任意的目标状态. 本文首先综述了有限域上多智能体系统的一致性, 从有无时滞及拓扑结构变化的角度, 梳理了达到一致性的代数判据与图论判据的异同以及联系. 其次论述了有限域上多智能体系统的可控性, 归纳总结了影响可控性的5个要素, 包括系统的模型、 拓扑结构、 领航者的选取、 域的阶数以及可控性下标. 最后总结全文并提出潜在的研究方向.
摘要:森林优化特征选择算法(FSFOA)具有良好的分类性能和维度缩减能力,但其初始化森林的质量参差不齐,局部播种和全局播种的随机性较大,且适应度评估代价较高导致计算效率较低.针对上述问题,本文提出一种基于评分机制的类贪心森林优化特征选择算法(feature selection using greedy-like forest optimization algorithm based on scoring mechanism, FSGLFOA-SM).首先,以每维决策变量的分类精度为其得分构建评分机制,提出类贪心初始化策略以生成较优质的初始化森林;提出基于评分比较的类贪心局部播种策略,使评分相对较高的决策变量获得更大的局部播种概率.然后,在全局播种阶段提出类贪心遗传算子播种策略,对候选森林择优重建并进行遗传、类贪心交叉和变异操作,以保留评分较高的特征维度,有利于提高全局播种阶段的分类准确率.最后,为解决昂贵适应度评估带来的计算效率低下问题,建立历史数据库,在适应度评估前先进行库内查找,减少了重复解个体的计算量.实验结果表明,相比6个对比算法,FSGLFOA-SM在13个UCI数据集上的分类精度和维度缩减率更加优越.
展开全部目录
 办公地点:东北大学 综合楼313室
办公地点:东北大学 综合楼313室
 通讯地址:沈阳市和平区文化路3巷11号 东北大学125信箱 《控制与决策》编辑部(110819)
通讯地址:沈阳市和平区文化路3巷11号 东北大学125信箱 《控制与决策》编辑部(110819)
 收件人:《控制与决策》编辑部 (如果快递,请选择EMS或顺丰快递,其他快递无法送达。)
收件人:《控制与决策》编辑部 (如果快递,请选择EMS或顺丰快递,其他快递无法送达。)
 电话: 024-83687766,23906437
电话: 024-83687766,23906437
版权所有 :控制与决策
技术支持:北京勤云科技发展有限公司

 E-mail: kzyjc@mail.neu.edu.cn
E-mail: kzyjc@mail.neu.edu.cn




版权所有 :控制与决策
技术支持:北京勤云科技发展有限公司
 Rss
Rss
 Email Alert
Email Alert